AUBO 海纳系列复合机器人操作手册(无线版)
1 关于本手册
本手册是 AUBO 海纳系列复合机器人配套软件的操作说明文档,适用于 ARCS 系统 0.31 版本及以上,ARCS 系统版本信息请参见《ARCS 示教软件用户手册》。
复合机器人适配型号有 AMR-300-S,复合机器人型号信息请参见《AUBO 海纳系列复合机器人产品手册》。
本手册仅作为操作指导参考,不作为产品功能和性能的保证。产品的具体功能及性能规格请以实际产品为准。
Copyright © 2015-2026 AUBO 保留所有权利。
1.1 手册用法
应在安装复合机器人后,软件操控、配置机器人时使用本手册。
1.2 阅读对象
本手册专为 AUBO 海纳系列复合机器人(无线版)用户使用,如客户、程序员、技术支持人员、操作人员等。
1.3 操作前提
读者应了解的基础知识:
- 基本的机器人操作知识
- AUBO Scope
1.4 关联文档
- AUBO 海纳系列复合机器人产品手册
- ARCS 示教软件用户手册
2 安全信息
用户必须认真阅读本手册,特别是带有警示标识的内容。机器人系统具有一定复杂性和潜在危险,操作人员必须充分认识到操作风险,严格遵守本手册中的所有规范和要求。
2.1 安全说明
| 标志 | 说明 |
|---|---|
 | 存在高度危险情况,如果不能避免,将导致人员重伤或死亡。 |
 | 存在危险情况,如果不能避免,将可能导致人员受伤。 |
 | 存在设备损坏或数据丢失潜在风险。 |
 | 需要特别注意的信息。 |
2.2 人员安全
机器人虽然运行速度可控,但由于机器人本身质量大、力矩强,在运动过程中发生停顿和停止后仍有可能发生危险。虽具备安全检测功能,但仍不能排除外部信号可能导致的轨迹变化。
在操作时必须确认紧急停止装置功能正常,进入工作区域前必须确认所有安全措施到位,并在操作过程中保持警惕,严格遵守安全守则。
请时刻保持警惕,确保自身安全!
2.3 安全守则
在开始操作机器人之前,请确保已熟悉了解《AUBO 海纳系列复合机器人产品手册》和《ARCS 示教软件用户手册》中描述的安全守则。
使用软件时,请遵循以下基本原则:
- 确保操作环境稳定,避免意外断电或网络中断。
- 随时留意机器人状态显示和警告信息。
2.4 数据安全
为保护您的程序和配置数据安全:
- 定期备份重要的机器人程序和配构建地图置。
- 请勿随意修改系统文件和参数。
- 更新软件前,建议先备份当前配置。
3 概述
3.1 简介
AUBO 海纳系列复合机器人是一款集成多功能于一体的智能机器人解决方案,专为现代工业自动化环境设计。该系列产品突破了传统机器人的应用局限,实现了对协作机器人、自动导航车(Automated Guided Vehicle, AGV)、机器人视觉系统及各类末端执行器的统一控制于协同工作。
复合机器人的多合一控制系统,可根据不同工作环境和应用需求灵活配置,大大简化操作流程,降低使用门槛。用户可通过交互界面实现复杂工作流程的编排,使工业自动化任务变得更加高效、精准和可靠。
3.2 产品清单
AUBO 海纳系列复合机器人标准配置包含以下文档资料:
| 序号 | 物品名称 | 件数 |
|---|---|---|
| 1 | AUBO 海纳系列复合机器人产品手册 | 1 本 |
| 2 | AUBO 海纳系列复合机器人操作说明书(无线版) | 1 本 |
| 3 | ARCS 示教软件用户手册 | 1 本 |
| 提示 | 说明 |
|---|---|
| 实际收到的物品可能因产品型号和配置不同而有所差异,请以订购合同为准。 |
3.3 版本说明
| 序号 | 版本信息 | 版本号 |
|---|---|---|
| 1 | AGVC 版本 | v0.6.3 及以上 |
| 2 | Steering 客户端版本 | v1.0 及以上 |
| 3 | ARCS 版本 | v0.31 及以上 |
| 4 | AUBO Scope 客户端版本 | v0.9 及以上 |
4 快速开始
欢迎使用 AUBO 海纳系列复合机器人。该系列机器人搭载了 AUBO 最新开发的 ARCS 系统,配合专用的 Steering 客户端实现 AGV 功能控制。ARCS 系统的示教软件 AUBO Scope 提供强大的示教、编程等功能,界面简单易懂,可以帮助用户快速掌握复合机器人的操作方法。
本章将指导您完成机器人的初始设置和基本操作,帮助您快速上手使用复合机器人,完整的功能说明请参考相应章节。
4.1 操作流程概览
以下表格介绍了 AUBO 海纳系列复合机器人使用的基本流程,便于您快速了解整体操作步骤。
| 序号 | 阶段 | 软件工具 | 关键操作 |
|---|---|---|---|
| 1 | 系统启动 | - | 机器人开机,连接电子移动设备 |
| 2 | 地图管理 | Steering | 构建、应用、修饰地图 |
| 3 | 路线规划 | Steering | 部署站点、规划路线、设置区域 |
| 4 | 任务编程 | AUBO Scope | 连接 AGV、编写程序、执行任务 |
4.2 操作步骤
4.2.1 准备
在开始操作前,请确保:
- 机器人电量充足。
- 电子移动设备(平板等)可正常使用。
- 操作环境安全,无障碍物影响机器人移动。
- 已阅读基本安全须知。
4.2.2 系统启动与连接
- 长按机器人电源键至电源键灯变绿,等待系统开机。
- 打开电子移动设备,连接机器人热点,具体参见“4.2 连接机器人”。
4.2.3 地图管理
- 打开 Steering 客户端,连接机器人。
- 构建地图:打开“设置 > 构建地图”,参见“7.3 构建地图”的指导完成地图构建,完成后点击右上角的对勾保存。
- 应用地图:打开“设置 > 地图管理”,选择已构建的地图,单击“…”可重命名,然后单击【应用】使用该地图。具体参见“7.4 地图管理”。
- 优化地图:打开“设置 > 修饰地图”,检查并调整地图中的障碍物、墙壁等元素,具体参见“7.6 修饰地图”。
- 验证定位:打开“首页”通过查看监控区的定位置信度、观察激光点云是否多数落在墙壁上等方式,检查机器人的定位是否准确,如需重新定位,请参见“7.2.2 AGV 控制功能”。
4.2.4 路线设置
- 部署站点:打开“设置 > 部署路线”,添加机器人行驶所需站点,具体参见“7.5 部署路线”。
- 设置区域:打开“设置 > 区域”,根据需要在地图中增加虚拟墙、减速区等特殊区域,具体参见“7.7 区域”。
4.2.5 程序编辑与执行
- 退出 Steering 客户端,打开 AUBO Scope 客户端,通过设备列表或手动输入 IP 连接机器人。
- 打开“配置 > 插件 > AMR”,连接 AGV。
- 打开“编程”选项卡,创建并编辑程序任务。
- 基础编程节点的介绍,请参见《ARCS 示教软件用户手册》。
- AMR 插件的编程节点介绍请参见“7.2 编程”。
- 编写完成后,给机器人上电,然后单击左侧菜单的【运行】按钮执行程序。
5 安装与连接
5.1 安装客户端
在开始安装前,请确保您的移动设备满足“附录:客户端安装环境要求”中的系统环境要求。
请在以下官网渠道下载最新版本的客户端:
AUBO Scope 客户端下载链接: https://developer.aubo-robotics.cn/download_center/soft_scope_download.html
Steering 客户端下载链接: https://download.aubo-robotics.cn/android/amr/
5.2 连接机器人
- 打开机器人电源开关,机器人启动后将自动开启内置 Wi-Fi 热点。
- 搜索并连接机器人热点。
- 热点默认名称为机器人 SN 码(见机器人铭牌);
- 默认密码:12345678。
- 启动客户端软件,按照界面提示完成连接。
| 提示 | 说明 |
|---|---|
| 如果无法找到或连接热点,请尝试以下方法: 1. 检查机器人启动状态是否正常。 2. 尝试重启机器人或移动设备。 3. 检查设备与机器人的距离,确保在有效连接范围内。 |
6 AUBO Scope 使用说明
AUBO Scope 是遨博专为 AUBO 机械臂开发的示教软件,用于机械臂的控制和编程。在海纳系列复合机器人中,除标准的机械臂功能外,AUBO Scope 还通过 AMR 插件支持与 AGV 系统交互。
关于 AUBO Scope 的基本操作请参见 《ARCS 示教软件用户手册》。
AMR 插件的详细功能与使用方法请参见本手册“8 AMR 插件(适用于 ARCS)使用说明”。
7 Steering 客户端使用说明
Steering 是遨博专为 AUBO 海纳系列复合机器人的自动导航车(AGV)开发的客户端软件,用于 AGV 的控制和管理。通过 Steering,用户可以构建地图、部署路线、监控 AGV 状态并进行实时控制。
7.1 界面介绍
Steering 界面主要由以下部分组成:
- 操作区域:显示可连接的机器人、地图和主要操作内容。
- 导航栏:包含各功能模块入口。
7.2 监控与控制
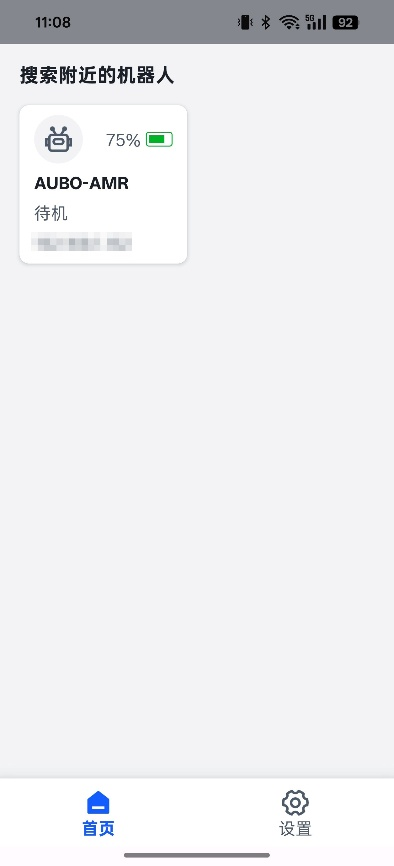
7.2.1 首页
Steering 客户端首页由以下几个部分组成:
- 监控区:显示 AGV 状态信息,单击此区域可进入地图页面,控制 AGV。
- 红色点云:激光雷达的实时检测数据。
- 快捷操作区:包含功能按钮。
- 开始运行:启动 AGV 执行预设任务。
- 返回充电:命令 AGV 返回充电站点。
- 电量 > 20%:完成当前任务后返回充电;
- 电量 < 20%:立即中断任务返回充电。
- 日志区:显示系统操作记录和 AGV 状态变化。

7.2.2 AGV 控制功能
单击监控区进入地图页面,可使用以下功能:
移动:通过移动控制键控制 AGV 的移动。

重新定位:当 AGV 定位不准时,可使用重新定位功能校正位置。
- 定位置信度:当前 AGV 在地图中的位置的可信度。
- 置信度 >60%:定位可信,AGV 正常运行。
- 置信度 <60%:定位不可信,需用户重新定位。
- 置信度 <25%:置信度过低,AGV 定位严重偏离,AGV 自动停止移动,日志提示异常。
- 置信度 >30%:AGV 恢复运行。
- AGV 定位方法:
- 选点重新定位:用户在地图中选择一个位置,系统将在该点附近 AGV 位置。
- 全局重新定位:系统自动在整个地图范围内确定 AGV 位置。

- 定位置信度:当前 AGV 在地图中的位置的可信度。
巡航导线:使 AGV 在两个已连接路线的站点之间移动。选择直接相连路径连接的两个站点作为起点和终点后,AGV 将沿着预设路线自动导航。

7.3 构建地图
构建地图是基础步骤,在初次使用机器人或机器人运行环境变更时必须至少完成一次构建。
操作步骤:
- 单击“开始构建”按钮进入新地图构建页面。
- 通过控制面板移动 AGV,系统将自动扫描并记录周围环境信息。
- 推荐使用“回”字形路线,即 AGV 扫描一圈回到起点。
- 地图构建完成后,单击右上角的对勾按钮保存地图数据。
地图元素图例:
- 黑色线条:实体环境边界,如墙壁、障碍物等。
- 白色区域:已完成扫描的可通行区域。
- 灰色区域:尚未扫描的未知区域。

7.4 地图管理
地图管理功能用于查看和管理所有已创建的地图,支持以下操作:
- 地图重命名
- 删除地图
- 地图应用(切换当前使用的地图)

7.5 部署路线
地图建好并应用后,可在“部署路线”中设置站点和连接路径。
| 提示 | 说明 |
|---|---|
| 两个站点之间只有连接路径后,AGV 才能在程序任务中正常移动。 |

7.5.1 添加站点
站点类型:
- 普通站点:一般移动目标点位。
- 充电站点:可充电的点位。
| 提示 | 说明 |
|---|---|
| 设置充电站点时,请保证车头与充电桩的距离在 0.5 – 1.5 米之间,且充电口须与充电桩对齐。 |
添加方式:
- 单击“添加站点”。
- 拖动地图选定位置,或移动机器人到指定位置后,单击“使用机器人位置”确定站点位置。
- 编辑站点名称、类型。
- 单击右上角对勾保存站点。

7.5.2 连接路线
两个站点之间,只有连接路线后才能进行导航。
操作步骤:
- 选择需要连接路线的两个站点。
- 选择路线类型。
- 单击【确定】添加路线。
路线编辑:
- 选中已连接的路线,可编辑名称和类型。
- 单击【编辑路线】可调整路径形状(直线、贝塞尔)。

7.6 修饰地图
建立地图后,可以手动修饰和调整地图细节。
- 黑笔:增加边界。
- 灰笔:添加未知区域。
- 橡皮擦:添加可通行区域。

7.7 区域

可在地图中增加特殊区域:
- 虚拟墙:设置 AGV 无法通过的区域,仅在自由导航时有效。
- 减速区域:设置 AGV 需低速通过的区域,可自定义 AGV 通行速度。
7.8 高级设置
可查看 AGV 的详细信息和实时状态,包括设备信息、AGVC 版本信息、运行统计数据、AGV 的实时状态参数等。
8 AMR 插件(适用于 ARCS)使用说明
AMR 插件是 ARCS 系统中用于管理和控制自动导航车(AGV)的功能模块,提供监测、状态和日志查看、任务编程等功能。
8.1 配置
8.1.1 界面介绍
AMR 插件界面由以下几个部分组成:
- 导航栏:包括连接、监测、状态、日志等功能选项卡。
- 操作区域:显示地图、机器人状态的主要区域。
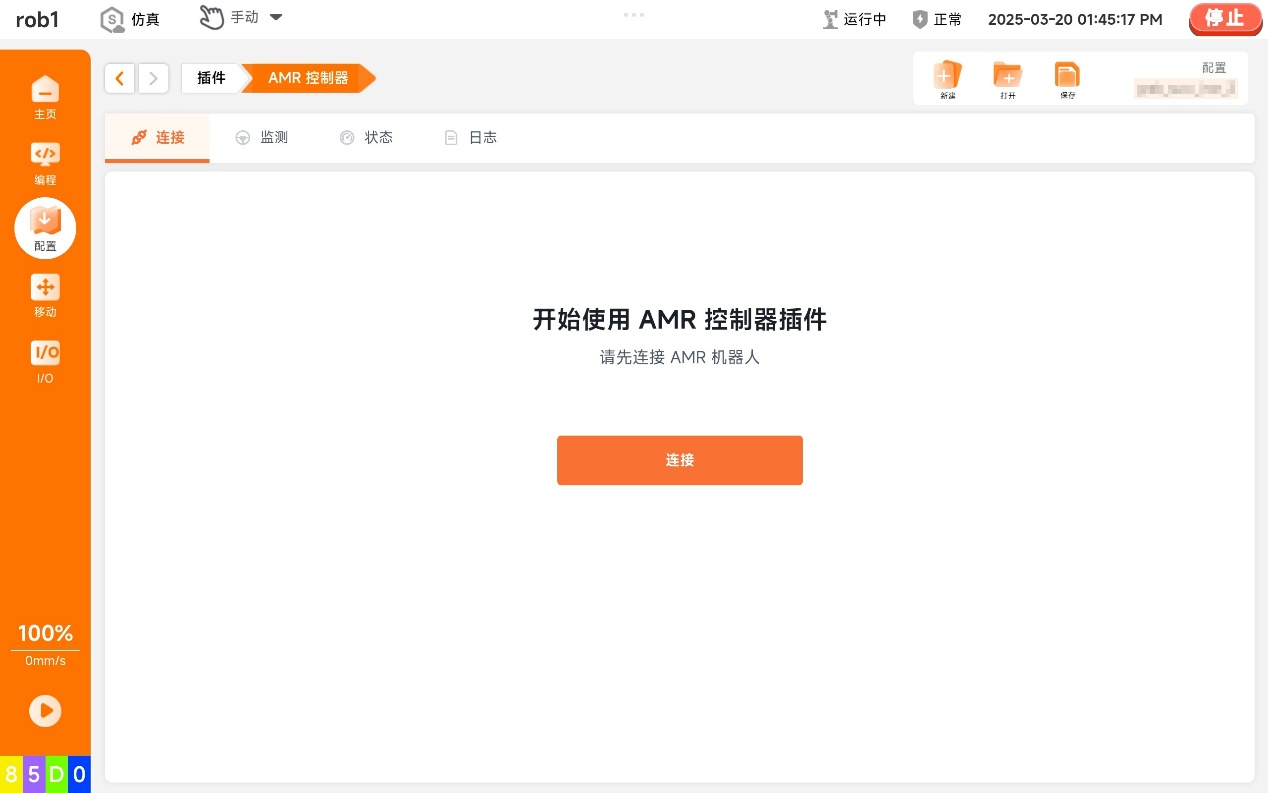
8.1.2 连接
在使用 AMR 插件前,需先连接目标 AGV。
| 提示 | 说明 |
|---|---|
| 必须先连接 AGV ,才能获取 Steering 客户端中配置的地图、站点等数据,所有监测和控制功能都依赖于此连接。 |
8.1.3 监测
监测功能用于实时观察和控制 AGV 在地图中的位置和状态。
地图操作功能:
- 重定位:当 AGV 定位不准时,单击此按钮,系统会自动搜索并校正机器人的位置。
- 复原:将经过缩放或平移操作后的地图重置为默认位置和大小。
- 遥控:激活 AGV 的移动控制键,可手动控制机器人的移动。
地图图例说明:
- 经过点:AGV 可通行的站点,可做路径规划的节点和目的地。
- 充电点:AGV 自动回充的站点,也可做经过点使用。
- 单向线:AGV 只能按箭头指示方向行驶的路径。
- 双向线:AGV 可在连接的两个站点间双向行驶的路径。
- 减速区:AGV 进入该区域后将自动降低速度至预设值。
AMR 插件的状态栏信息:
- AGV 名称:当前连接的 AGV 名称。
- AGV 电量:当前电池电量。
- AGV 状态:当前 AGV 的运行状态。
- 任务状态:当前任务执行情况。
- 定位状态:当前位置状态。
- 定位置信度:当前 AGV 在地图中的位置的可信度。

8.1.4 状态
此页面可查看 AGV 的详细息和实时运行参数,内容同“7.8 高级设置”。

8.1.5 日志
日志功能用于查看和分析 AGV 运行过程中的各类事件记录。

8.2 编程
8.2.1 巡线
编程中的“巡线”节点,用于配置 AGV 在程序中的移动路径。
配置选项:
- 移动:勾选此项,选择目标站点和移动方向。
- 选择中间站点:可选择 AGV 在前往目标点过程中需要经过的站点。
- AGV 运动参数设置:设置 AGV 运动速度、角速度等参数。
- 到达目标点后根据站点方向旋转:勾选后,AGV 到目标站点时,会自动调整朝向至站点预设方向。

8.2.2 回充
编程中的“回充”节点,用于配置 AGV 自动充电行为的触发条件和完成条件。
- 最小值:设置触发充电的电量阈值(百分比)。当 AGV 电量低于最小值时,AGV 移动至充电站点充电。
- 最大值:设置充电完成的电量阈值(百分比)。当 AGV 充电量达到此值时,AGV 离开充电桩,移动到指定位置继续执行任务。
- 充电点:选择指定站点,AGV 将前往该充电站点进行充电;“自动选择”则前往距离 AGV 最近的充电站点。
- 满电待机点:选择指定站点,AGV 将在充电完成后,自动导航至指定站点待机等待;“不设置”则自动回到当前充电站点待机等待。

| 提示 | 说明 |
|---|---|
| 建议将最小值设置为 20% 以上,以保证 AGV 有足够的电量前往充电站点。 |
9 附录:客户端安装环境要求
| 名称 | 需求 |
|---|---|
| 操作系统 | Android 9 及以上 |
| CPU | 2.0 GHz(四核)及以上 |
| 内存 | 4 GB 及以上 |
| 屏幕分辨率 | 1920×1080 及以上 |