AUBO 海纳系列复合机器人使用手册
1 版权与免责声明
版本信息
v1.0.0
用户手册会定期进行检查和修正,更新后的内容将出现在新版本中。本手册中的内容或信息如有变更,恕不另行通知。对本手册中可能出现的任何错误或遗漏,或因使用本手册及其中所述产品而引起的意外或间接伤害,遨博(北京)智能科技股份有限公司概不负责。安装、使用产品前,请阅读本手册。请保管好本手册,以便可以随时阅读和参考。本手册中所有图片仅供示意参考,请以收到的实物为准。本手册为遨博(北京)智能科技股份有限公司专有财产,非经遨博(北京)智能科技股份有限公司书面许可,不得复印、全部或部分复制或转变为任何其他形式使用。
Copyright © 2015-2026 AUBO 保留所有权利。
2 硬件安装
2.1 基本配件
| 序号 | 配件名称 | 图片 |
|---|---|---|
| 1 | 遨博协作机械臂 |  |
| 2 | 移动地盘 |  |
| 3 | 2D 工业相机 |  |
| 4 | 自动充电桩 |  |
| 5 | 平板电脑 |  |
| 6 | 手动充电器 |  |
| 7 | 机械臂连接线缆 |  |
| 8 | 相机网线 |  |
| 9 | 机供电线缆与光源延长线 |  |
| 10 | 电动夹爪 |  |
| 11 | 电动夹爪线缆 |  |
| 12 | 锂电池 |  |
| 13 | USB 转 485 模块 |  |
2.2 按钮和接口介绍
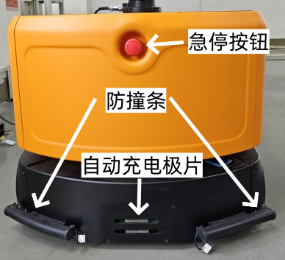
图 1
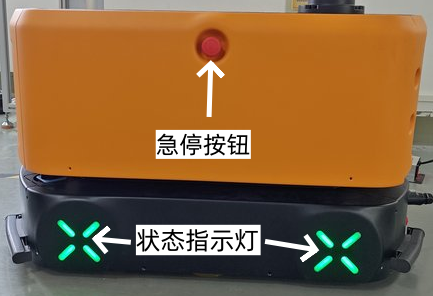
图 2
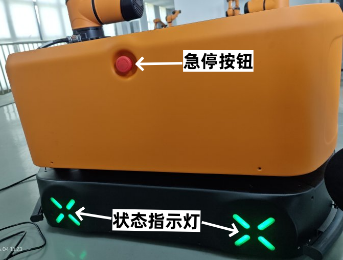
图 3
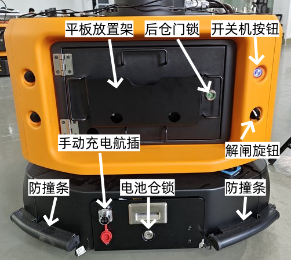
图 4
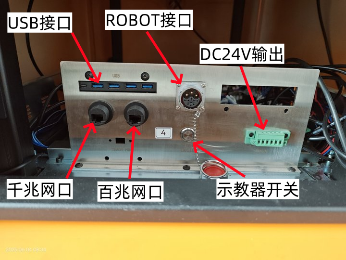
图 5
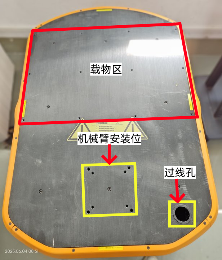
图 6
- 急停按钮:急停按钮位于移动底盘上层前面、左侧、右侧,按钮位置如图 1、图 2、图 3,用于紧急停止设备。
- 开关机按钮:开关机按钮位于设备底盘后部,如图 4,用于对设备进行开机及关机,并通过按钮指示灯显示设备当前状态。
- 解闸旋钮:解闸旋钮位于设备底盘后部,如图 4,用于紧急停止设备。
- 防撞条:本设备共有 4 条防撞条,位于设备底盘的四个角,位置如图 1、图 4,用于地盘移动碰撞物体后紧急停车。
- 自动充电口:自动充电接口位于移动底盘前部,如图 1,用于连接充电桩进行自动充电。
- 手动充电口:手动充电口位于移动底盘后部,如图 4,用于连接手动充电器进行手动充电。
- 状态指示灯:设备状态指示灯位于设备两侧,如图 2、图 3,指示灯会显示设备当前状态以及电池电量。
- 平板支架:平板支架位于设备后仓门上,位置如图 4,用于放置平板电脑。
- 后仓门锁:位置如图 4,固定后仓门,防止地盘移动时后仓门打开。
- 电池仓锁:位置如图 4,固定电池仓,防止地盘移动时电池仓滑出。
- USB3.0:图 5 所示。
- 机械臂连接航插:图 5 所示,用于连接机械臂。
- 24V 电源输出:图 5 所示,用于给外部设备提供 24V 直流电。
- 示教器开关:图 5 所示,当连接有线示教器时,需按下该按钮方可启用示教器的急停。
- 百兆网口:图 5 所示,用于连接网络接口。
- 千兆网口:图 5 所示,用于连接网络接口。
- 设备载物区:图 6 所示,用于安装物料架或者摆放随车物料。
- 机械臂安装位:图 6 所示,用于安装机械臂。
- 过线孔:图 6 所示,用于设备外部设备线缆穿过。
2.3 指示灯光状态说明
| 状态分类 | 触发条件/操作 | 灯光指示详情 |
|---|---|---|
| 急停状态 | 按下急停按钮 | ◉ 电源指示灯:红色常亮 ◉ 底盘灯光:暗红色闪烁 |
| 开机待机 | ||
| - 开机过程中 | 长按电源键至绿灯亮起 | ◉ 电源指示灯:绿色常亮 ◉ 底盘灯光:彩虹渐变效果 |
| - 开机完成 | 系统启动完毕 | ◉ 电源指示灯:蓝色常亮 ◉ 底盘灯光:颜色随电量变化 ✓ 充足 (>50%):绿色 ✓ 中等 (~30%):橙色 ✓ 低电 (<30%):红色 |
| 解闸状态 | 旋转解闸旋钮 | |
| - AGV 关机时 | ◉ 电源指示灯:红色快闪(2Hz) ◉ 底盘灯光:同步红色快闪 | |
| - 开机过程中 | ◉ 电源指示灯:绿色慢闪(1Hz) ◉ 底盘灯光:红色慢闪 | |
| - 待机状态 | ◉ 电源指示灯:蓝色慢闪 ◉ 底盘灯光:红色慢闪 | |
| 任务状态 | ||
| - 导航运行中 | 执行路径导航任务 | ◉ 电源指示灯:蓝色常亮 ◉ 底盘灯光:蓝色呼吸效果(渐明渐暗) |
| - 充电中 | 接入充电桩 | ◉ 电源指示灯:蓝色常亮 ◉ 底盘灯光:橙黄色呼吸效果 |
| 异常状态 | ||
| - 电力中断 | 外部电源断开 | ◉ 电源指示灯:蓝色常亮(需确认) ◉ 底盘灯光:粉红色呼吸效果 |
| - 故障报警 | 系统检测到异常 | ◉ 底盘灯光: ✓ 彩虹循环效果 ✓ 或红色急促闪烁(3Hz) |
2.4 硬件安装
2.4.1 安装机械臂
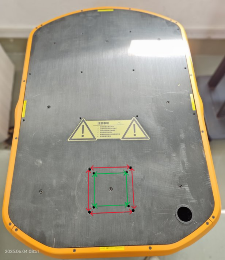
图 7

图 8

图 9

图 10

图 11
图 7 中红绿双箭头为移动底盘上台面机械臂安装孔位,其中红色箭头所指的孔位为 i10 及 i10 以上的型号的机械臂安装螺丝孔;绿色箭头所指的螺丝孔是 i5 和 i7 型号的机械臂安装螺丝孔。
根据机械臂型号选择合适的安装孔位将机械臂安装到底盘上(机械臂螺丝孔见图 8)。机械臂连接线缆一端连接机械臂底座航插(图 9),另一端穿过底盘上台面过线孔(图 10)与移动底盘 ROBOT 接口航插连接(图 11)。
2.4.2 安装工业相机
- 使用 M6×14mm 的圆柱头内六角螺丝(图 12)将相机模块安装到机械臂法兰(法兰安装孔见图 13,相机螺丝孔见图 14),安装完成如图 15。

图 12

图 13

图 14

图 15
- 使用相机网线,网线一端插入相机网口并锁紧水晶头固定螺丝(图 16),另一端穿过底盘上台面过线孔插入接口板千兆网口(图 17)。

图 16

图 17
- 使用相机供电线缆与光源延长线,一端连接相机供电口和光源电源线(图 18、图 19),另一端穿过底盘上台面过线孔插入接口板 DC24V 输出接口(图 20),正负极不可接反。

图 18

图 19
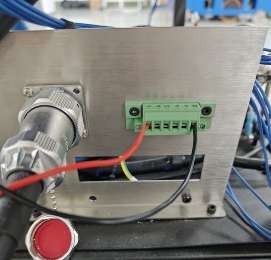
图 20
2.4.3 安装夹爪
- 拆下电动夹爪法兰连接块(图 22);

图 21

图 22
- 使用 M6×14mm 的平头内六角螺丝(图 23)将夹爪连接件安装到相机法兰连接件下方(图 24);
图 23

图 24

图 25
将电动夹爪主体安装到夹爪连接件上(图 25);
将电动夹爪线缆航插头的一端插到电动夹爪的航插母头上,并旋转拧紧固定螺母(图 26);线缆另一端穿过底盘上台面过线孔,棕色为正极插入接口板 DC24V 输出正极,蓝色为负极插入接口板 DC24V 输出正极,白色为 485A 接口连接 USB 转 485 模块 A 接口,黑色为 485B 接口连接 USB 转 485 模块 B 接口(图 27),将 USB 转 485 模块 USB 公头插到接口面板的 USB 接口上(图 28)。
图 26
图 27
图 28
- 电动夹爪安装完成。
3 基础操作
3.1 电池更换
- 设备关机
- 解锁并拉出电池仓
- 拔掉电池连接插头并拿出原有电池
- 放入新电池并插上电池连接插头
- 推入并锁上电池仓

图 29

图 30

图 31

图 32
3.2 设备解闸
当需要人为推动设备,进行设备挪移时,先确保设备电池有电,方可操作解闸。
设备解闸步骤如下:
- 右旋解闸旋钮
- 按下急停按钮
- 挪动设备
- 左旋解闸旋钮
- 拔出急停按钮
注意:
非特殊需要请勿让解闸旋钮长时间保持右旋状态!!设备关机后,解闸旋钮右旋电池会进入持续放电状态,容易让电池亏空损坏电池。
3.3 设备开机/关机
- 开机:设备关机状态下,长按开关机按钮直至按钮指示灯蓝灯亮起;
- 关机:设备开机状态下,长按开关机按钮直至按钮指示灯绿灯闪烁。
3.4 手动充电

图 33

图 34

图 35

图 36
将手动充电器三脚插头插入 220V 三孔插座,待到手动充电器显示屏显示电压 54.6V 左右(图 33),将充电器航插端插到设备手动充电航插口(图 35),当充电器显示屏显示电流不为 0 时(图 36),手动充电操作完成,设备开始正常充电。
3.5 外部设备 24V 供电接线
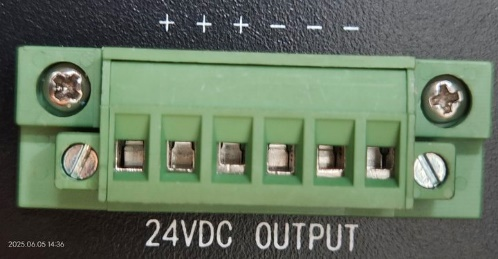
图 37
设备 24V 供电接口位于设备接口面板上,具体位置如图 16,该图片中的三号箭头所指接口,如图 37。将外部设备供电端的正极接入该接口的左侧正极端,外部设备供电端的负极接入该接口的右侧负极端。
4 软件安装与更新
4.1 Steering 客户端安装
Steering 客户端下载地址: https://download.aubo-robotics.cn/pre-release/amr/

选中带有 Steering 名称的安装包,双击下载。
将该安装包导入至平板内部,或者在平板浏览器中下载。
根据安卓软件安装引导进行操作。
4.2 ARCS 客户端更新
ARCS 客户端下载地址: https://download.aubo-robotics.cn/pre-release/android/
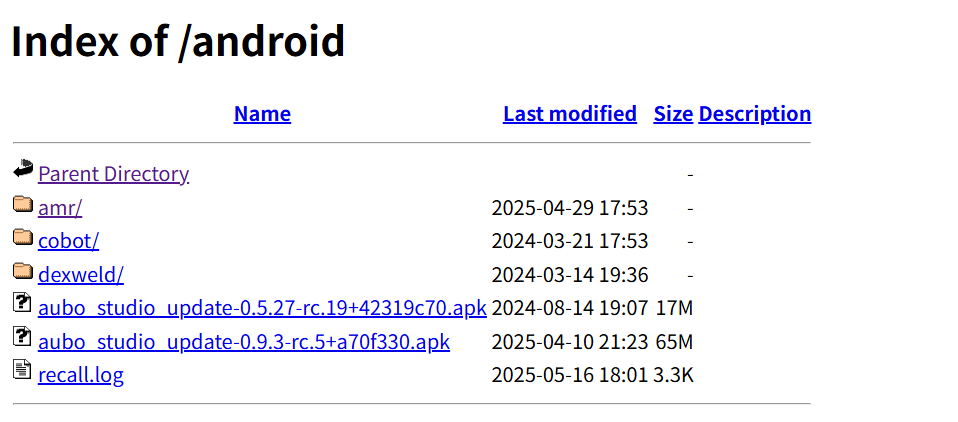
选中带有 aubo_studio_update 名称的安装包,双击下载。
将该安装包导入至平板内部,或者在平板浏览器中下载。
根据安卓软件安装引导进行操作。
4.3 ARCS 更新
进入 aubo_studio 页面,点击“设置 > 系统 > 更新”显示以下列表。
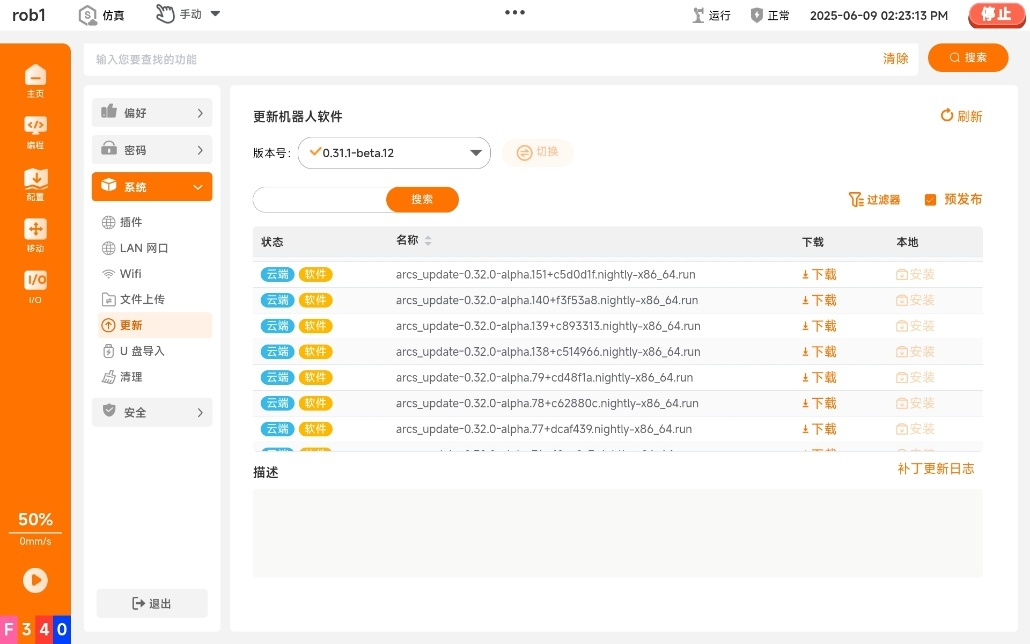
选中需要更新的版本点击下载。
根据引导完成安装。
5 网络配置
5.1 机器人工业网关配置
笔记本连接路由器,输入网址 192.168.168.200 进入路由器网址。
输入账户 admin,密码 Admin-985# 。
进入网络管理,选择桥接模式。

搜索本地 WIFI 网络,输入密码进行连接

按下图配置 ip 地址和 dhcp 服务

将 SSID 配成车的 SN 码、配置密码为 12345678

同上,需要将 ssid 配置为 sn 码,密码为 12345678

设置确认无误后点击重启:

如果连接的 5G 频段网络,需要关闭 5G 频段的热点


注意:
这里关闭哪个频段需要根据连接的 WiFi 选择,连接的是 5G 就关闭 5G。

6 激光标定
6.1 标定前准备
- 确认车辆基本功能正常
车辆经过系统测试,可以正常使用程序。各节点运行正常。车辆可以移动使用。
- 替换 agvc.toml 文件
cd /opt/agvc_ws/install/agvc_bringup/share/agvc_bringup/config
cp agvc.toml /root/agvc/config- 启动 laser_odom_calibration 节点
打开终端,并输入:
cd /opt/agvc_ws
source install/setup.bash
ros2 launch laser_odom_calibration laser_odom_calibration.launch.py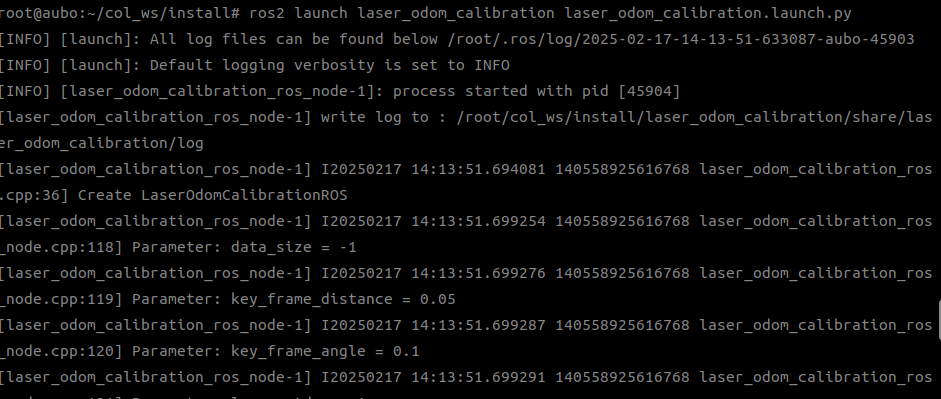
- 启动 auto_calibration 节点
打开一个新终端,并输入:
cd /opt/agvc_ws
source install/setup.bash
ros2 launch auto_calibration auto_calibration.launch.py
6.2 开始标定
- 采集数据
打开一个新终端,并输入:
cd /opt/agvc_ws
source install/setup.bash
ros2 service call /auto_calibration/calibration_command
agv_calibration_msgs/srv/CalibrationCommand "command: 2"手动控制 agv,使其进行 8 字形移动,这时会看到第一个启动的终端里面,一直在刷新,当标定数据量大于两千时,数据采集完成。
- 进行标定
终端中输入:
cd /opt/agvc_ws
source install/setup.bash
ros2 service call /auto_calibration/calibration_command
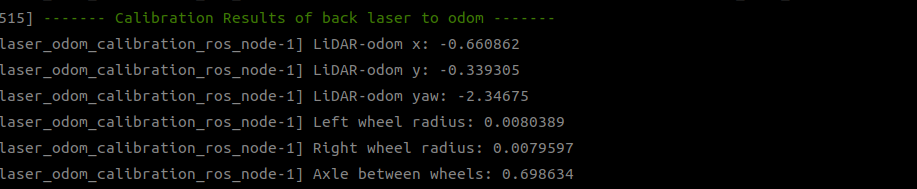
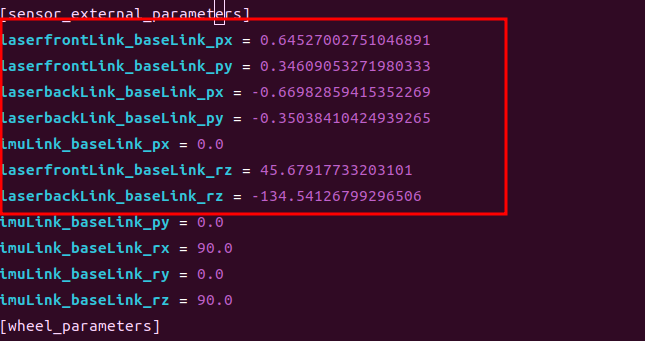
agv_calibration_msgs/srv/CalibrationCommand "command: 4"标定完成可以看到结果,如下图
对比参数,对比前后激光的 left wheel radius 和 right wheel radius 观察结果是否相近。
cd /root/agvc/config
vim agvc.toml观察终端的数据是否已经写入
6.3 标定结果验证
- 前后雷达激光数据是否重叠;
- 数值是否与设定值接近;
标定完成后重启设备。
7 地图搭建
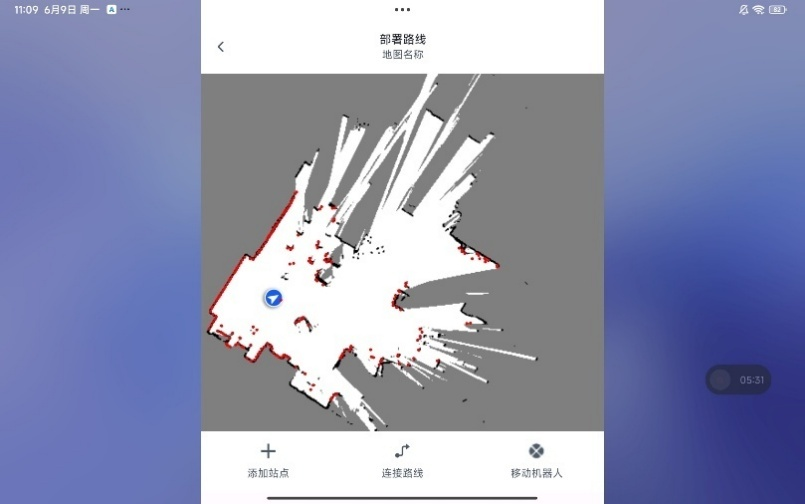
7.1 扫描地图
连接设备
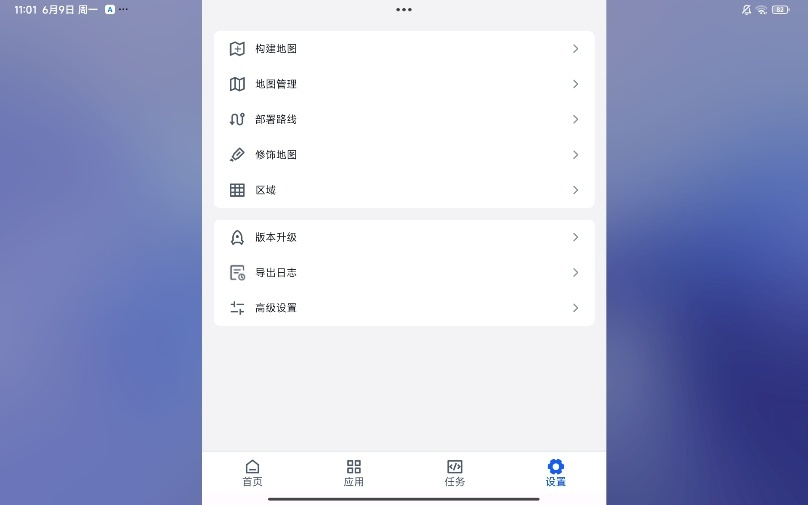
点击设置,构建地图进入建图模式。
点击开始构图。
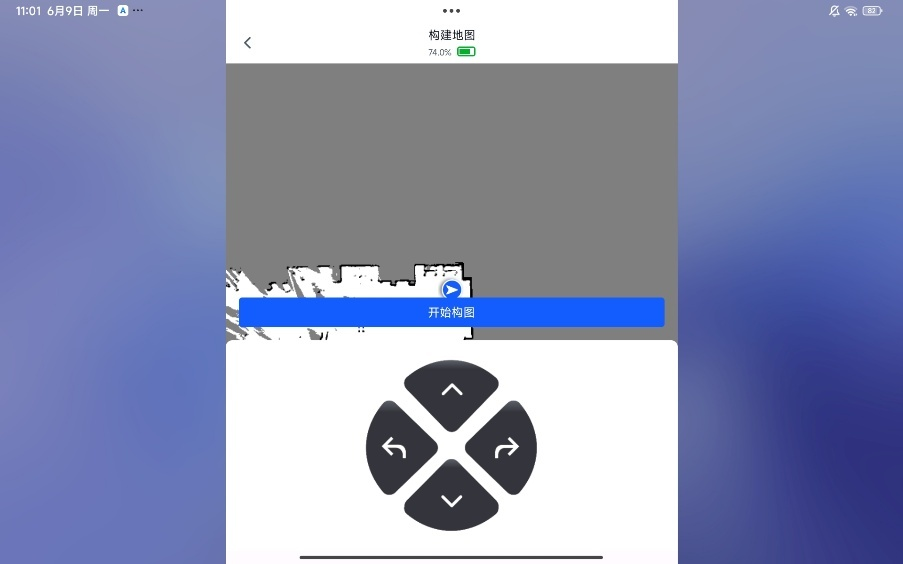
开环控制 AGV 进行移动,扫描周围的环境形成闭环。
点击确定进行保存
7.2 站点与路径配置
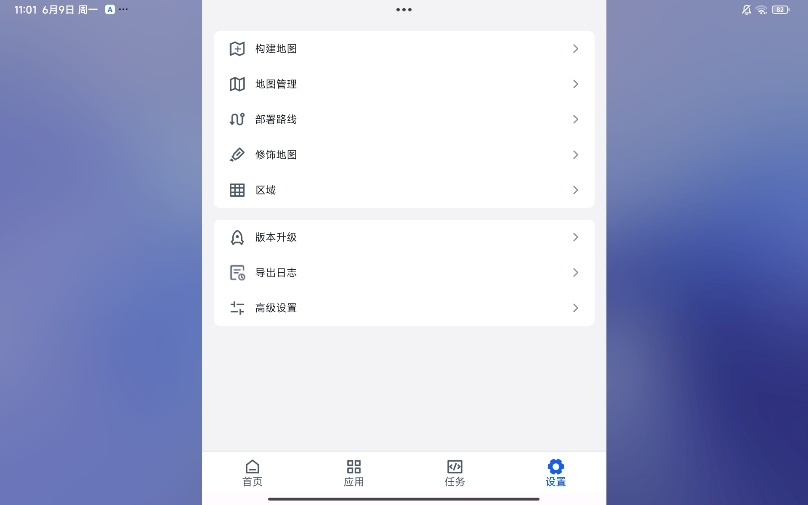
点击设置,部署路径进入编辑地图模式。
点击添加路点,使用机器人当前位置或是手动设置位置坐标进行设置。
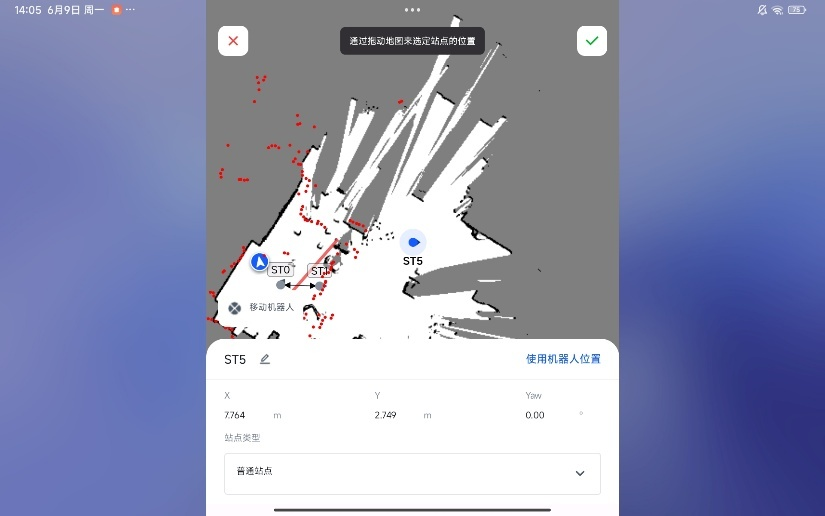
点击路径,设置起始站点和结束站点,选择路径类型进行设置。

8 视觉标定插件调试
8.1 基本说明
8.1.1 各文件夹说明
视觉服务端的工作目录是 /root/visual_position_ws。
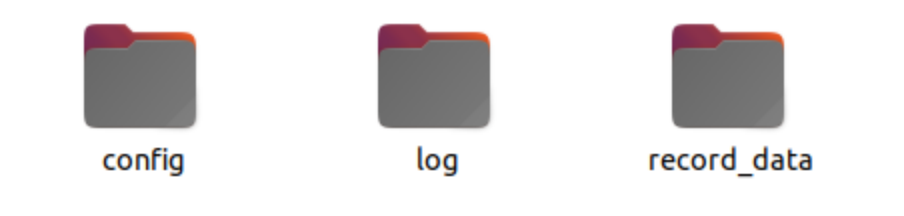
工作目录结构:
config: 存放配置文件log: 存放日志信息record_data: 存放 debug 模式下拍摄的图像和数据信息
8.1.2 配置文件说明
visual_position.toml
version = "0.0.1"
virtual_env = false
# 相机参数:内参矩阵、畸变系数、重投影误差
camera_intrinsics = [5276.246250, 0.0, 1607.094121, 0.0, 5275.387485, 1092.866504, 0.0, 0.0, 1.0]
camera_distortion = [0.001934, 0.070549, 0.003559, 0.002654, 0.000000]
re_projection = 0.21
# 手眼参数:眼在手上/手外、旋转矩阵、平移向量
eye_in_hand = true
hand_eye_R_cam2gripper = [0.026434, -0.999641, -0.00437334, 0.999568, 0.0264877, -0.0127271, 0.0128384, -0.00403502, 0.999909]
hand_eye_t_cam2gripper = [0.0849458, -0.000530306, -0.00371018]
# Charuco 参数
squares_x = 5
squares_y = 7
square_len = 0.004
marker_len = 0.0024
refine = false
dictionary = "DICT_4X4_50"
# Arucoboard 参数
arucos_x = 5
arucos_y = 7
aruco_len = 0.0032
aruco_interval = 0.0008
refind_strategy = true
aruco_dictionary = "DICT_6X6_250"
debug_data = false8.2 常见问题排查
1. 确认相机是否正常工作
AGV 开机后,相机的信号指示灯处于闪烁状态(如下图所示,PWR 蓝色指示灯处于闪烁状态),说明相机取图正常。

如果状态不对,可以查看相机驱动是否正常启动:
sudo ps -aux | grep hik_camera_driver_node2. 运行视觉抓取期间偶发相机在拍照位显示未识别到
问题排查:
(1). 肉眼估算当前相机的视野是否可以覆盖 tag 标记,如果确实拍不到属于 AGV 定位精度问题。 (2). 如果估算可以拍到 tag,在当前位姿下保持机械臂和 AGV 不动,进入 AGV 终端,终端输入如下指令:
# Charuco
curl --request POST 'http://0.0.0.0:30210/jsonrpc' --data '{"jsonrpc":"2.0","method":"getCharucoPose","params":[[0.338422,0.0653555,0.346477,-3.1413,0.001363,-0.0482567]],"id":0}'
# Arucoboard
curl --request POST 'http://0.0.0.0:30210/jsonrpc' --data '{"jsonrpc":"2.0","method":"getArucoboardPose","params":[[0.338422,0.0653555,0.346477,-3.1413,0.001363,-0.0482567]],"id":0}'如果可以获取到结果,则可能是机械臂未运动到位就拍照导致,需要在视觉定位节点前面增加延时如 sleep(0.5)。
如果未获取到结果,则表示当前位姿下确实识别不到 tag,需要重新示教拍照点。
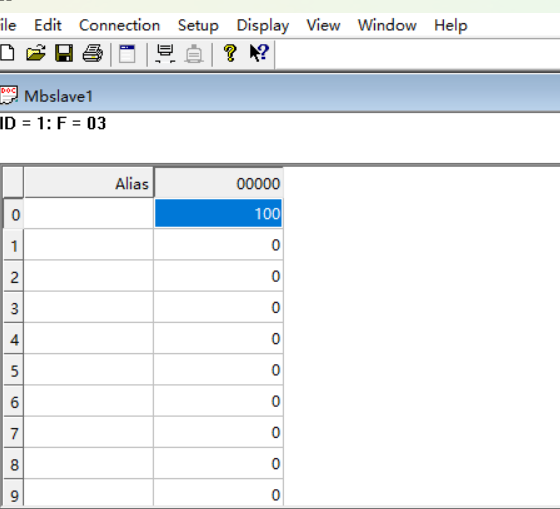
9 Modbus 通讯
在电脑端下载 Modbus Slave 软件,用于模拟 Modbus 从站。
Modbus Slave 进行连接,设置本地 IP 地址,设置端口号为 502。

设置地址值,如在地址 0 设置值为 100,寄存器类型为 03 保持寄存器。
aubo_studio 上建立 ModbusTCP 连接,APP 作为主站连接电脑从站。

设置信号,读取保持寄存器的 0 地址。
设置信号值为 50。


01 线圈寄存器,02 离散输入寄存器,03 保持寄存器,04 只读寄存器。这四种寄存器用法一致。01 和 03 寄存器是可读可写,02 和 04 寄存器是只读。
10 电动夹爪通讯配置
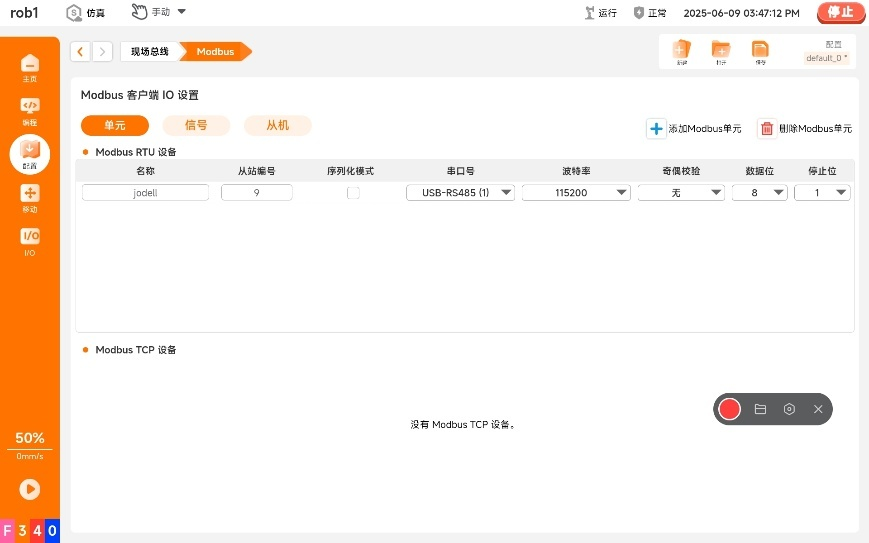
此处以钧舵夹爪 RG75 举例。
- 硬件连接夹爪至复合机器人。
- 设置 modbusRtu 配置:
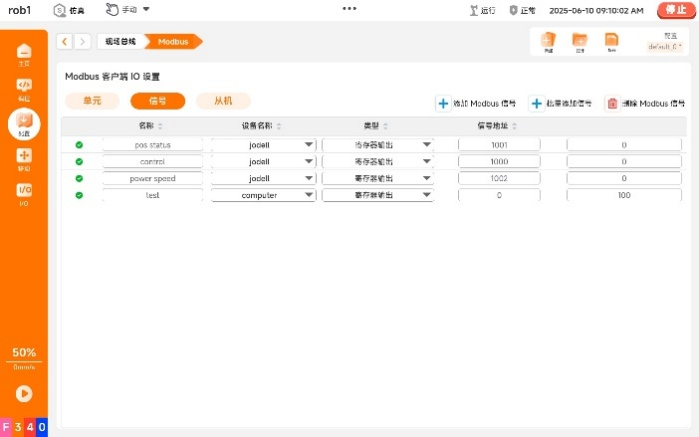
- 设置 modbus 信号:
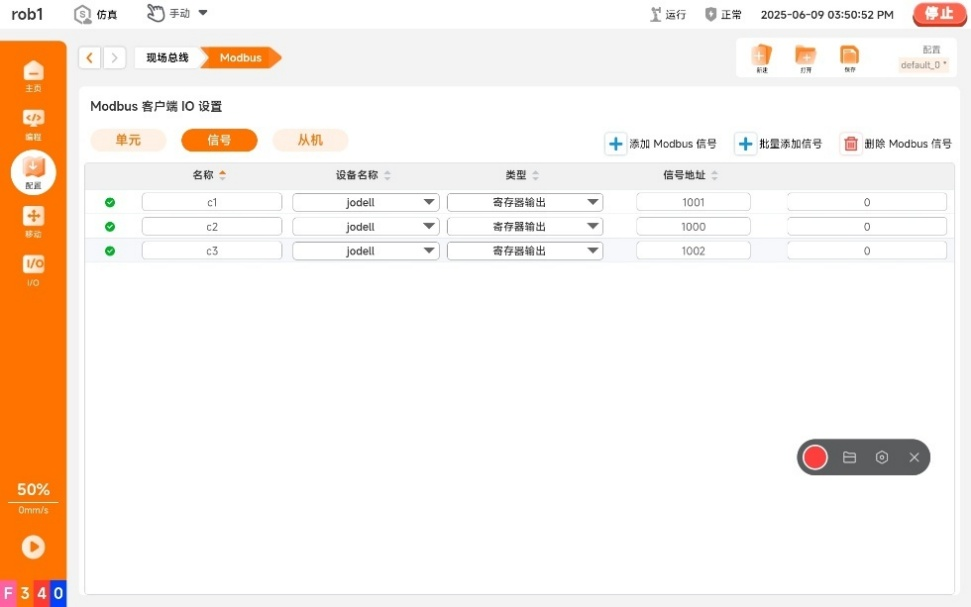
- c1 代表夹爪状态与位置状态功能。
- c2 代表夹爪使能与初始化功能。
- c3 表夹爪设置与力度功能。
modbusRTU 设置名称存在异常,因此定义 c1、c2、c3 表示。
在该地址中,一个地址代表 1 字节,一个状态占半个字节。在 c2 中输入 1 进行初始化,该步骤是必须的。接着再 c2 输入 9,其功能代表全速全力全距打开。可以观察到 c1 的数值为 255,由于夹爪无异常,状态为 0。由于是 255,代表全距打开。转化成二进制为 00000000 11111111,转化成十进制为 255。c3 为 65535,代表 speed 和 force 都为 255,其二进制为 11111111 11111111,转化成十进制为 65535。
11 程序编写
1. 添加插件条件循迹:
选择移动,设置目标站点和中间站点。需要将整条导航路径上的站点都进行添加,否则无法进行导航。
2. 添加视觉定位,选择对于的 aruco 码进行识别。
3. 添加视觉抓取,生成对于的条件树: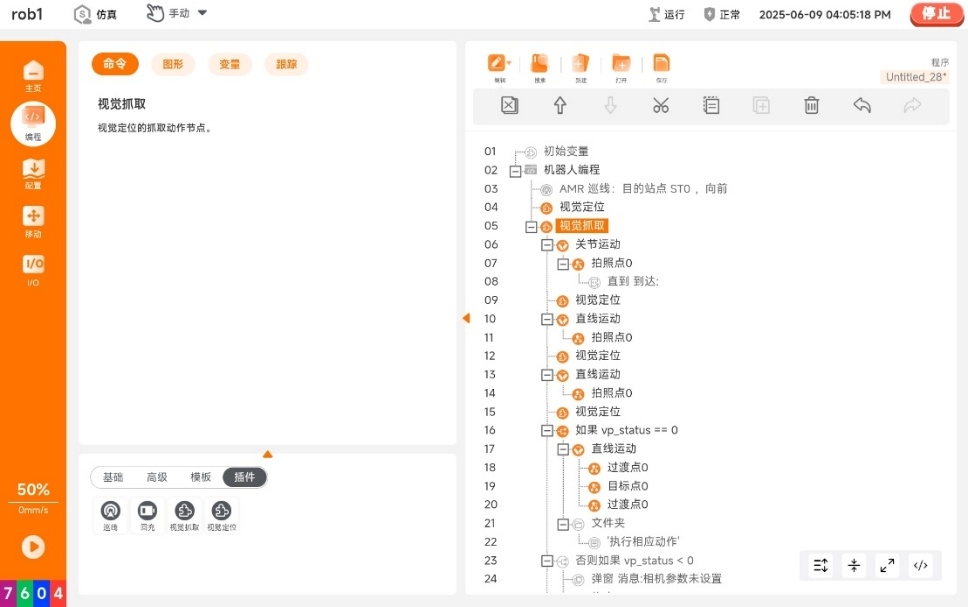
设置三个一样的拍照点进行拍照。再设置抓取点,即目标点与过渡点。