一般
原点
【原点】界面内包含机器人的常用位姿,用户可以在此对自定义原点位姿进行设置,也可以将机器人快速运动到常用位姿。
- 机器人:仿真当前机器人状态。
- 原点:查看当前 “原点” 的位姿参数,设置常用位姿或控制机器人运动到常用位姿。
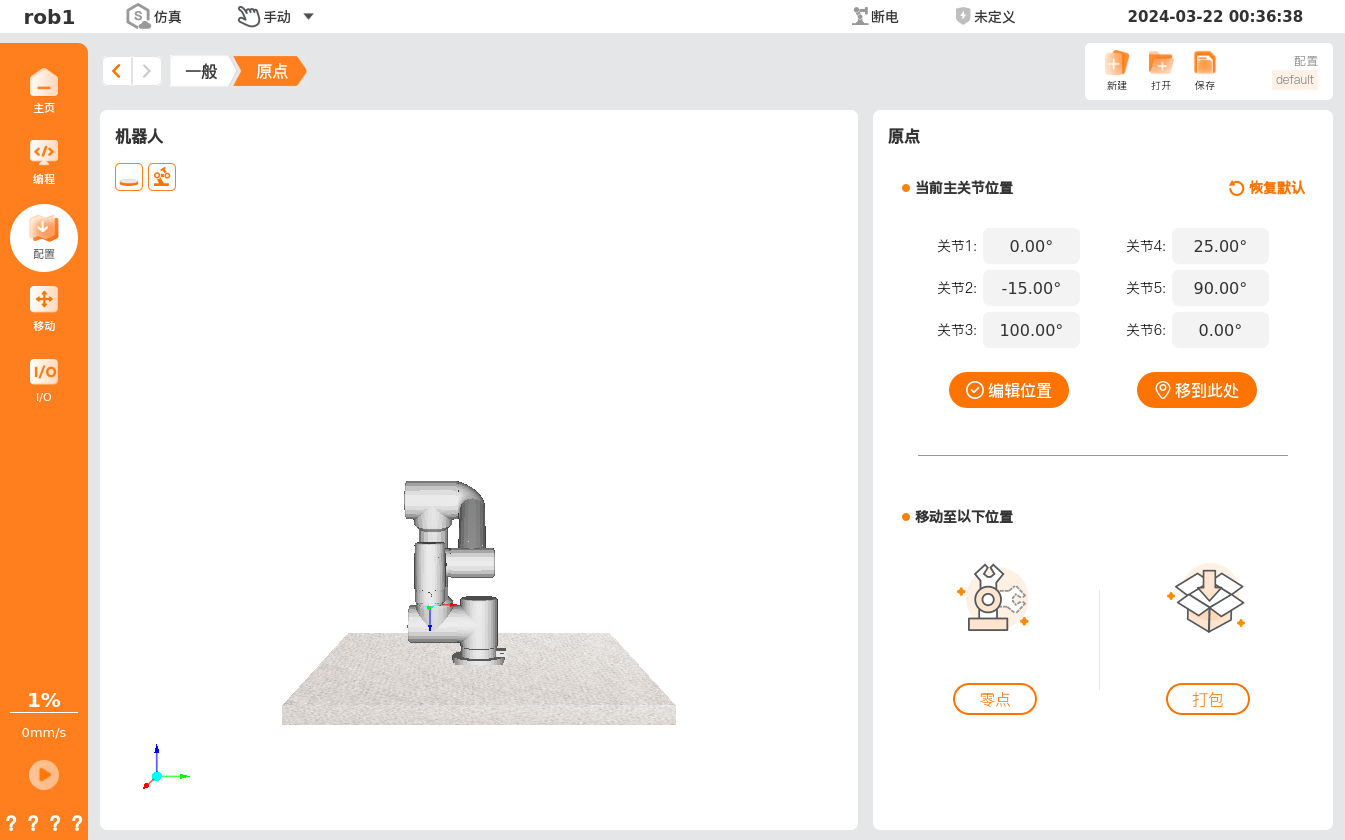
- 编辑位置:编辑用户自定义原点位姿。单击【编辑位置】按钮进入【移动】界面,移动机器人设置位姿,单击【确定】保存并返回。
- 移到此处:快速移动机器人到原点位姿。单击【移到此处】快速进入【移动】界面,关节控制框中橙色数字显示当前原点位姿的各关节参数,长按【原点】或【自动】按钮移动机器人到原点位姿,单击【确定】或【取消】返回。
- 恢复默认:清除用户自定义的原点位姿,恢复默认的原点位姿。
- 零点:快速移动机器人到零点位姿。
- 打包:快速移动机器人到打包位姿。打包位姿是机器人打包运送时使用的位姿。
I/O 设置
I/O 配置方法请参见 I/O 配置,I/O 可配置功能介绍请参见 I/O 功能。
启动
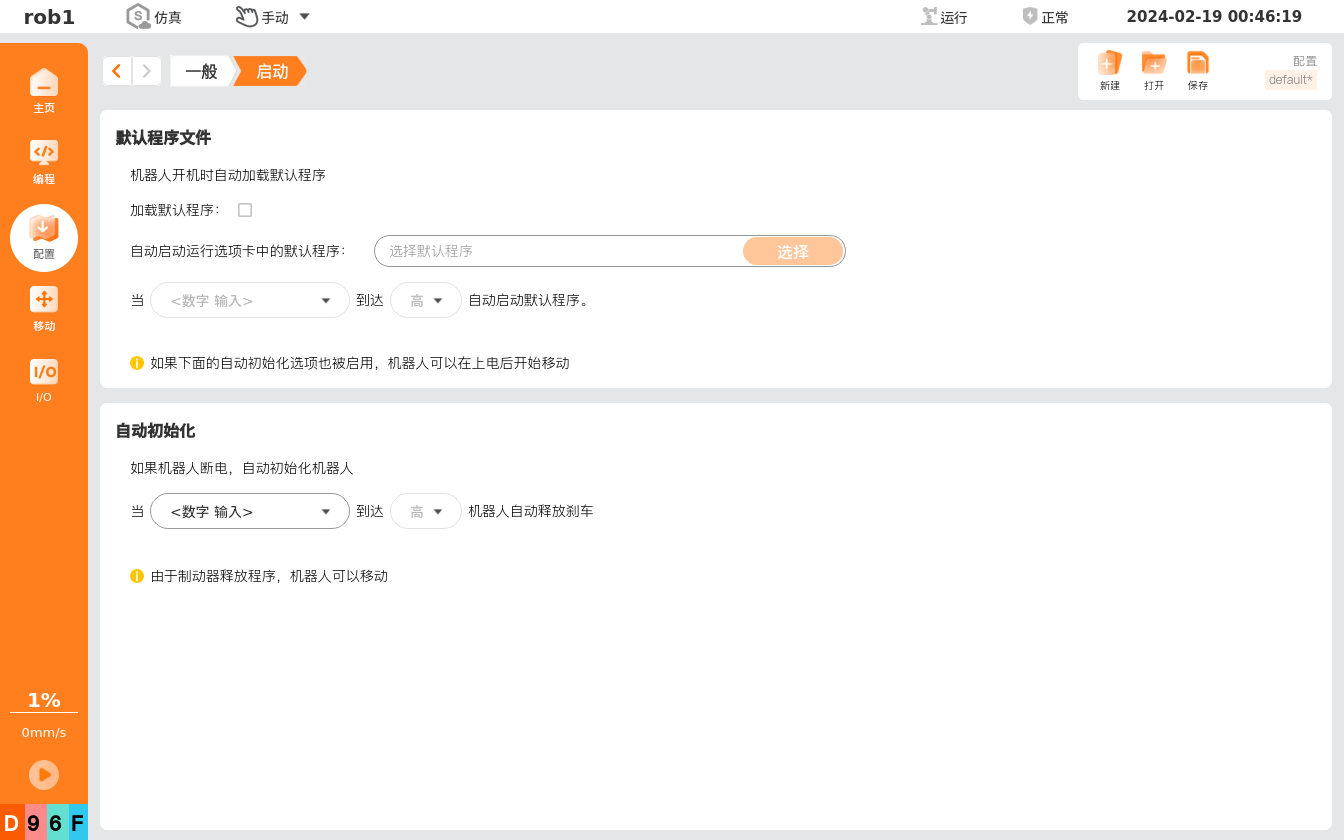
【启动】可设置默认程序与自动初始化。默认程序是控制器开机后自动加载的程序,系统在进入运行程序且未加载任何程序时,将自动加载默认程序。自动初始化,即如果机器人断电,当机器人接收到信号时,机器人进行初始化使机器人恢复可运行状态。
警告
- 当自动连接机器人、自动上电、自动加载程序被启用时,只要输入信号与选定的信号电平相匹配,机器人在控制器上电后立即运行程序。例如:在低电平情况下,不需要边沿转换到选定的信号电平。
- 信号电平设置为低电平时请小心。输入信号默认为低电平,使程序自动运行而不受外部信号的触发。
注意
离开运行程序或单击示教软件中的停止按钮将禁用自动启动功能,直到再次按下运行按钮为止。
工具中心点
请参见机器人基本操作-负载与 TCP。
负载
请参见机器人基本操作-负载与 TCP。
工具 I/O
机器人末端(关节 6)提供两类接口:8 针工具 I/O 接口与 4 针工具 RS485 接口,可为末端工具(如夹持器等)提供电源和控制信号。各型号的末端接口配置可能不同,具体以实物及产品规格书为准。
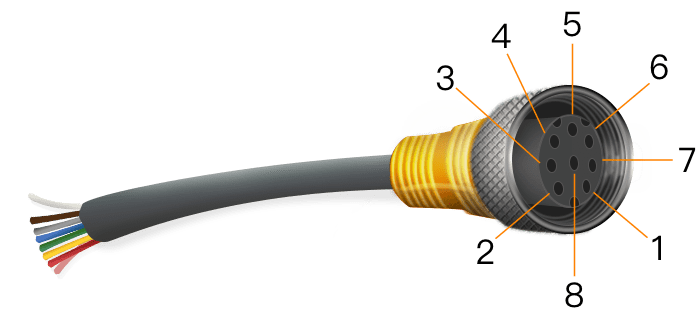
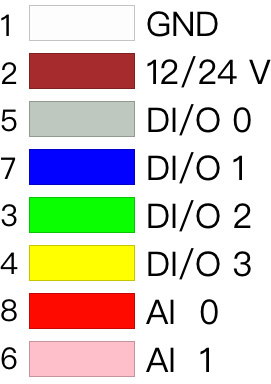
工具 I/O 接口
工具 I/O 接口为 8 引脚连接器,如下图所示,用户通过管脚 3/4/5/7 可配置 4 路数字 I/O,通过管脚 6/8 配置模拟输入,模拟电压范围为 0V ~ 10V;管脚 2 可配置 0 V、12V 和 24V 三种输出电压。
【工具 I/O】界面可设置末端工具的控制方式、电源电压、数字 I/O 的通信方向。工具末端各 I/O 口的功能设置请参见 “I/O 功能”,I/O 口的状态监控请参见 “I/O 选项卡”。
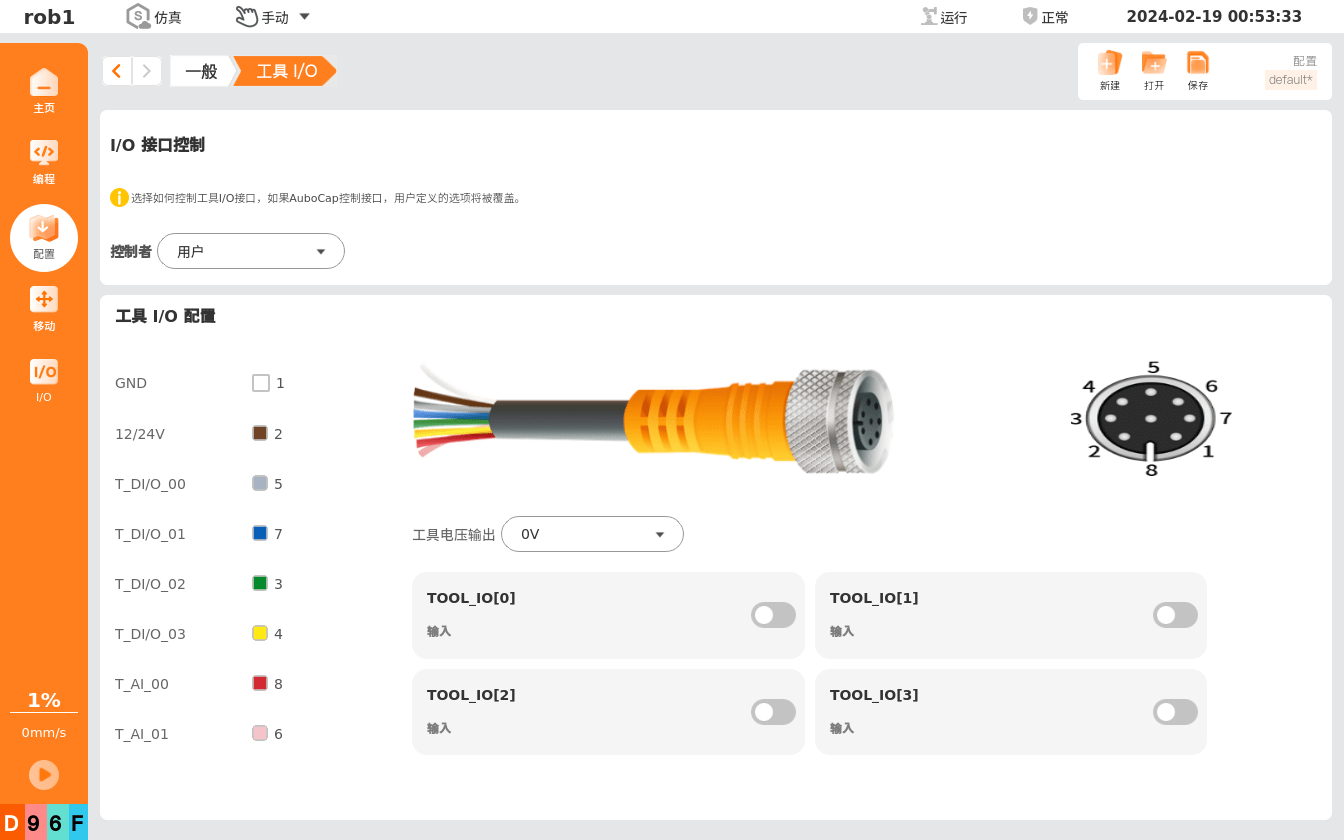
- 控制权:切换工具 I/O 接口的控制者。
- 工具 I/O 输出电压:设置工具数字 I/O 在输出模式下的电压档位(单位: V)。更换工具或系统重置后,请复核,确保与工具额定电压匹配。
- TOOL_IO[0] ~ TOOL_IO[3]:设置工具数字 I/O 的通信方向。
工具 RS485
配置并激活工具后,系统将依据传感器尺寸及安装位置,自动将默认工具中心点(TCP)设定在传感器法兰处。同时,在显示机器人模型时,传感器模型将同步显示。

激活工具
填写工具参数,填写完成后打开页面右上角按钮激活传感器。
- 类型:选择六位力传感器。
- 品牌:目前支持坤维、宇宏敏芯、宇力、智立、柯力、蓝点、鑫精诚。
- 型号:对应品牌下对应的型号。
- 安装偏移:用于补偿传感器坐标系与法兰坐标系的偏移,一般为 0,目前只有宇立传感器需要设置偏移 45°。
按钮打开后可依据激活指示灯的状态来辨别工具激活状态,激活成功后显示出【零点校正】和【传感器调试】功能按钮。
激活状态灯:
未激活为灰色。
激活成功为绿色。
激活失败为红色。

零点校正功能 零点校正主页显示上次校正后的偏置,如需重新校准可以单击页面右下角的【重新校准】按钮,进入重新校准界面,重新校准分为手动校准和自动校准功能。
- 自动校准:通过自主运动到预设的三个位姿实现,使用时需要注意干涉。
- 手动校准:需要根据提示示教三个位姿,并开始校准流程。

传感器调试功能 传感器调试界面主要用于查看传感器数据曲线,同时拥有记录数据,回放数据,选择数据类型,数据坐标系和设置显示数据时间的功能。

变量
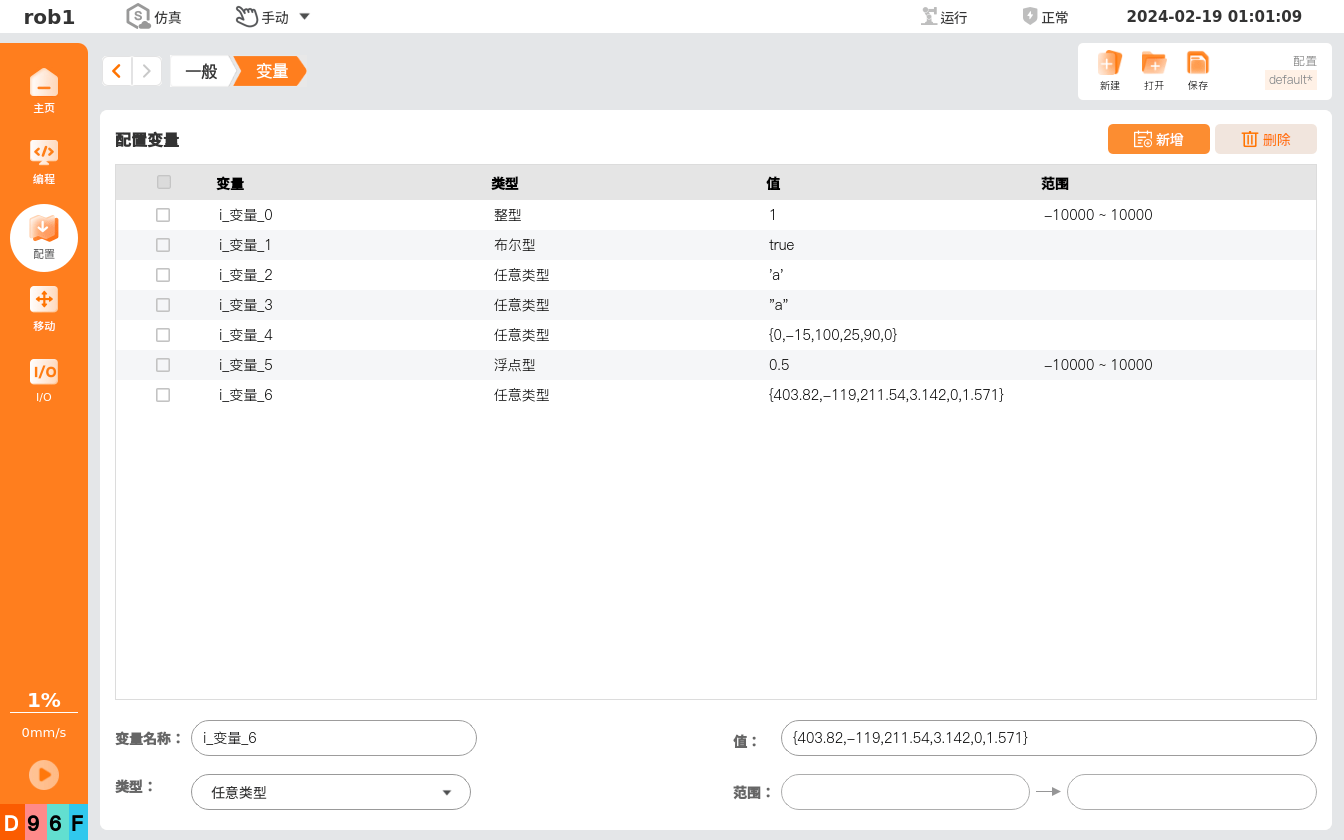
在该界面创建的变量称为 “配置变量”,用法与程序变量类似,分为 Bool、Int、Float、String、Pose 五种类型。配置变量与程序变量的区别是:配置变量的名称和值储存在安装配置文件里,用户可以在多个程序中使用相同的变量。
【变量】界面可创建配置变量,并设置配置变量的初始值,单击配置管理工具栏的【保存】即可保存设置。程序运行过程中,该界面可实时更新配置变量的状态。
- 全局保持:
1. 变量种类
- 程序变量:该变量仅适用于正在运行的程序,且变量值在程序停止后即丢失,属于常规程序变量,具体请参见 “编程选项卡-基础程序节点-赋值”。
- 配置变量:该变量可以用于多个程序,且变量名和变量值在机器人安装期间持续存在,属于保持型变量。
- 脚本变量:该变量来自脚本文件,可被赋予不同的变量类型。脚本变量不出现在【编程】界面或【配置】界面中。机器人程序使用脚本变量来存储有关路点的信息。
以系统是否保存变量值、变量是否可应用于多个程序为分类标准,变量可以分为以下两种类型:
- 保持型变量:这些变量可以用于多个程序,且变量名和变量值在机器人安装期间持续存在。保持型变量在 AuboStudio 软件或者控制器重启后会保持它们的值,如配置变量。
- 常规程序变量:这些变量仅适用于运行程序,且变量值在程序停止后即丢失,如程序变量。
2. 数据类型
布尔型(Bool):布尔型变量,其变量值为 true/false。
整型(Integer):整型变量,其变量值为整数。
浮点型(Float):浮点型变量,其变量值为浮点数值。
字符串型(String):字符串型变量,其变量值为字符串类型值,需使用单引号
'或双引号"包裹。位置型(Pose):位置型变量,其变量值为机器人路点信息,包含 6 位参数,分两种情况:
- 在直线运动下,位置型变量的前 3 位为位置参数,单位为 mm,后 3 位为姿态参数,单位为 rad。
- 在关节运动下,位置型变量的 6 位参数分别为六个关节的角度,单位为弧度。
记录
【记录】界面可以存储一段时间内机器人运动的轨迹,存储的轨迹可以添加在程序里。
- 仿真模型:仿真机器人状态。
- 轨迹:新建/编辑/保存/删除轨迹。
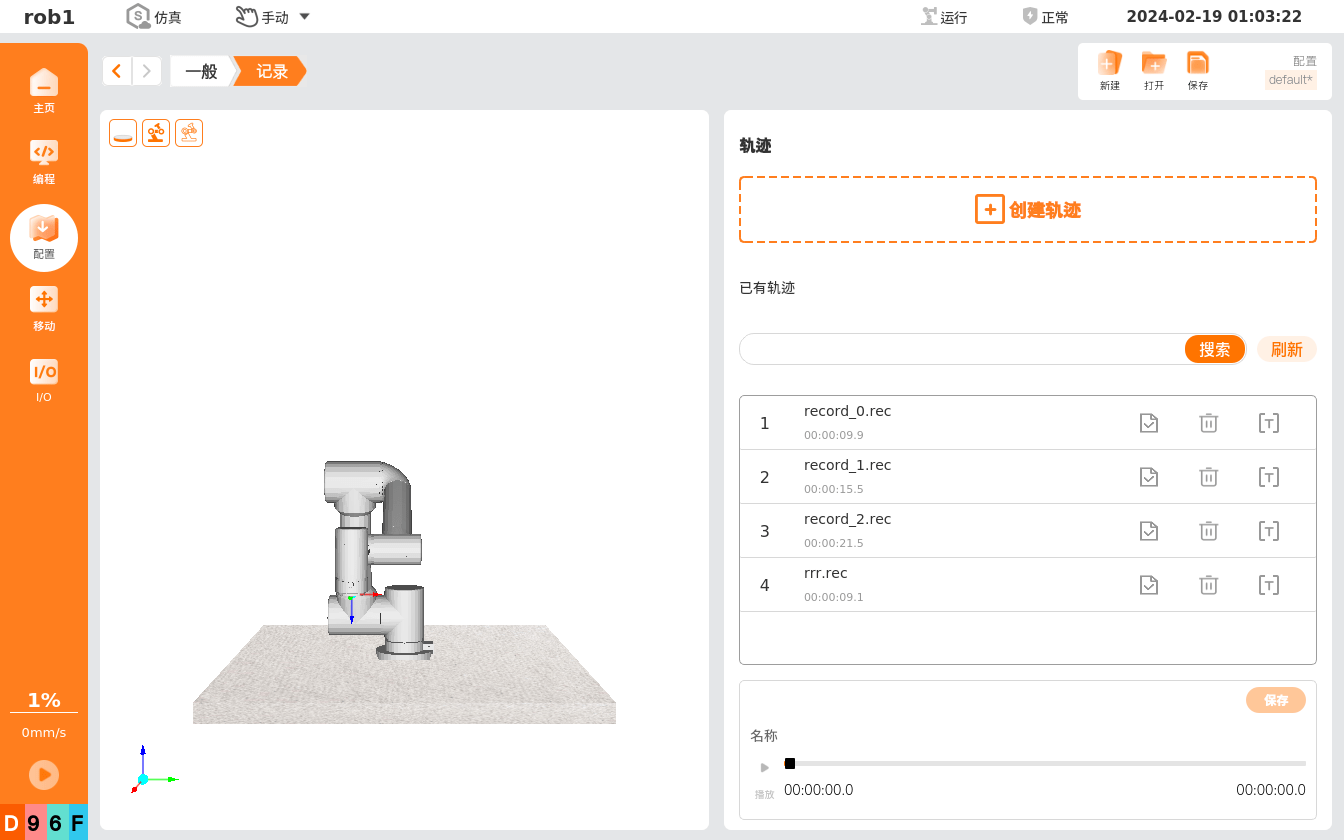
- 创建轨迹:单击【创建轨迹】按钮进入【移动】界面,通过位置/姿态控制按钮操控机器人,系统开始记录机器人的运行轨迹。运行结束后,单击【确定】,编辑轨迹名称保存轨迹。
- 搜索:通过轨迹名称搜索轨迹。
- 刷新:刷新轨迹列表。
 加载:加载轨迹。
加载:加载轨迹。 重命名:重命名轨迹文件。
重命名:重命名轨迹文件。.png) 删除:删除轨迹。
删除:删除轨迹。 播放:播放当前加载的轨迹。单击【播放】 后,进入【移动】界面,将机器人移动至初始位置,单击【确定】开始播放轨迹,【播放】 会变为【暂停】
播放:播放当前加载的轨迹。单击【播放】 后,进入【移动】界面,将机器人移动至初始位置,单击【确定】开始播放轨迹,【播放】 会变为【暂停】 。
。
1. 新建一段轨迹
单击【创建轨迹】进入【移动】界面,单击
 开始记录,通过位置/姿态控制按钮操控机器人,系统会记录机器人的运行轨迹和时间,单击
开始记录,通过位置/姿态控制按钮操控机器人,系统会记录机器人的运行轨迹和时间,单击  退出【移动】界面。记录完成后,单击
退出【移动】界面。记录完成后,单击  会弹窗提示给轨迹文件命名,单击【保存】返回【记录】界面。
会弹窗提示给轨迹文件命名,单击【保存】返回【记录】界面。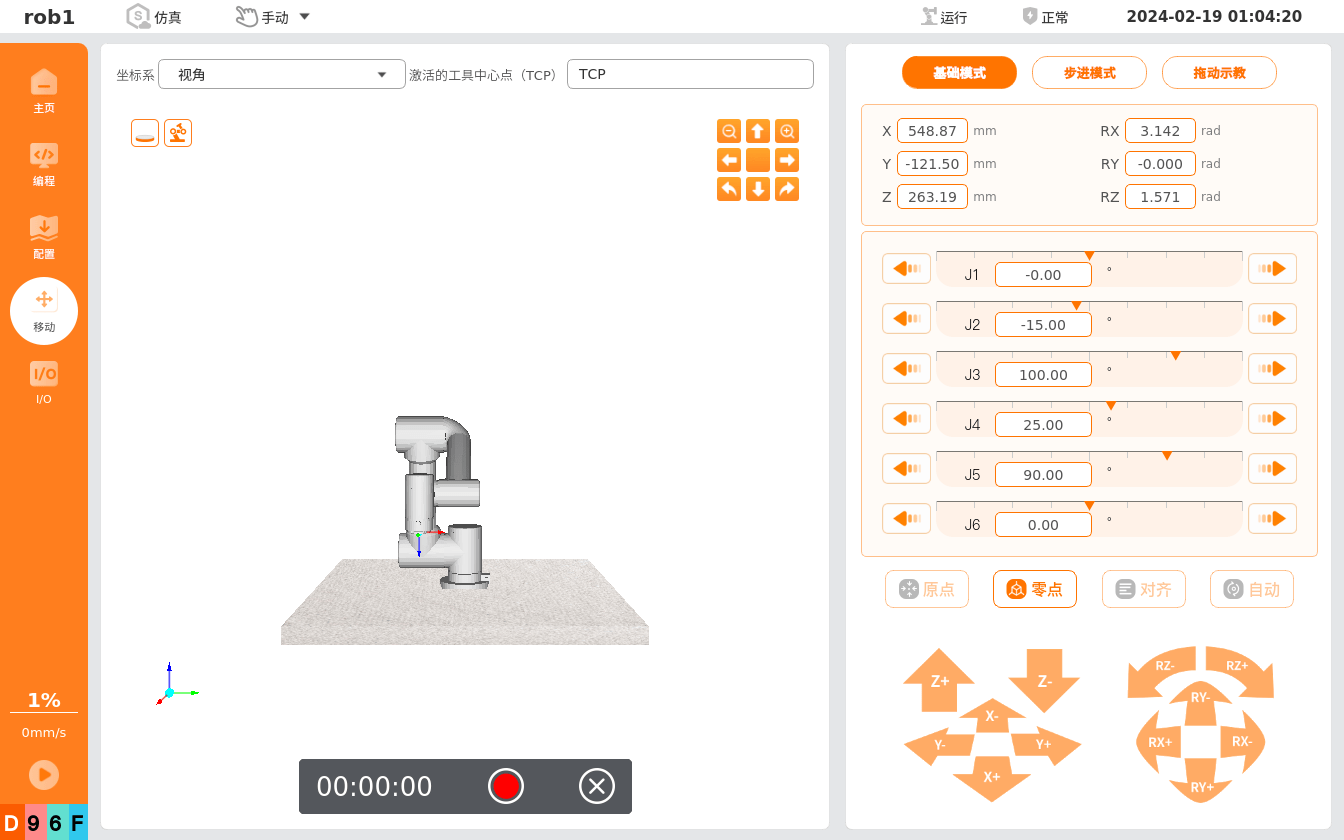
单击
可对记录的轨迹重命名。在轨迹列表中选择已保存的轨迹文件,单击【加载】
将轨迹加载到播放器中。
坐标系
请参见机器人基本操作-坐标系。
拖动阻尼
请参见移动示教-拖动示教-拖动阻尼。
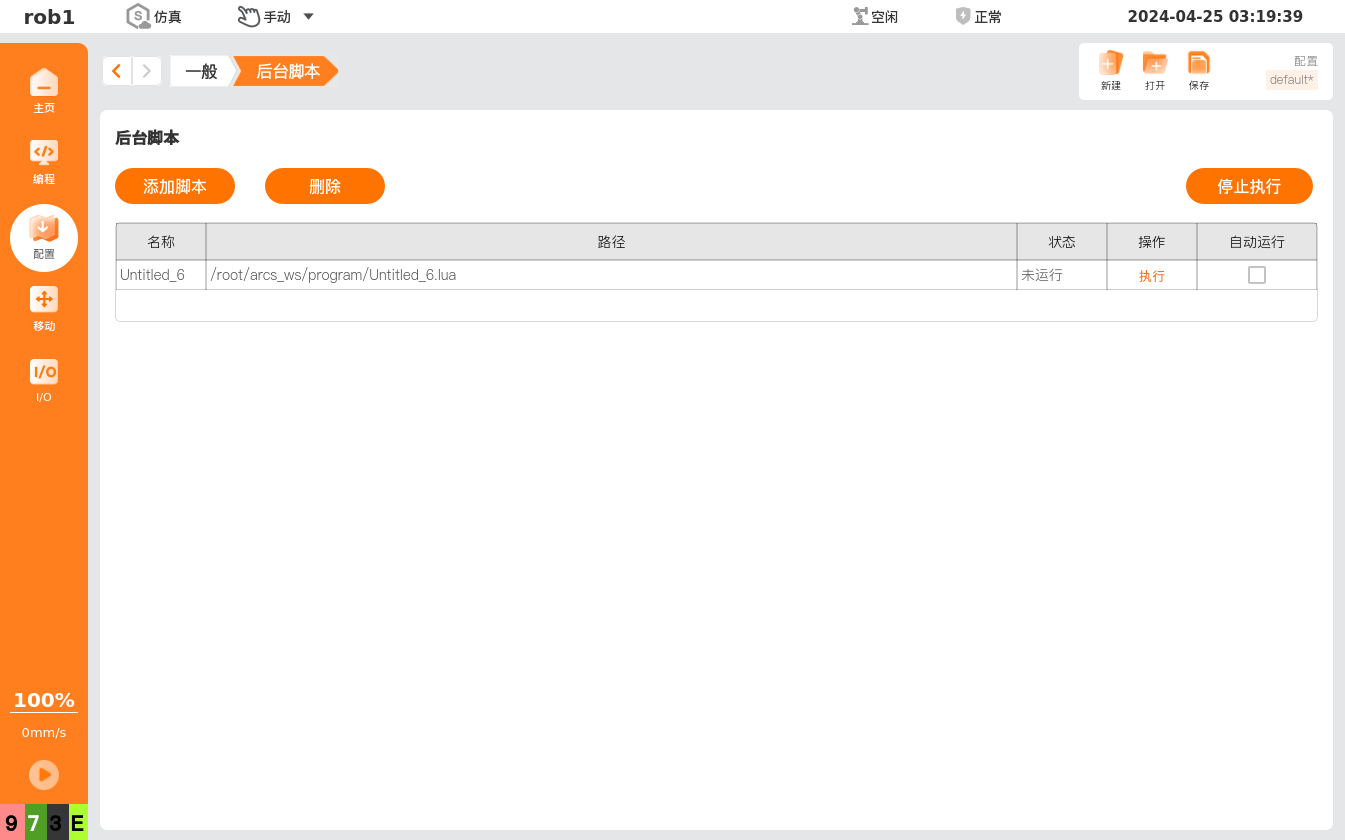
后台脚本
【后台脚本】可以设置多个后台运行的脚本,用户可以根据需求进行设置。
注意
在【后台脚本】中添加的脚本不可包含机器人运动指令。
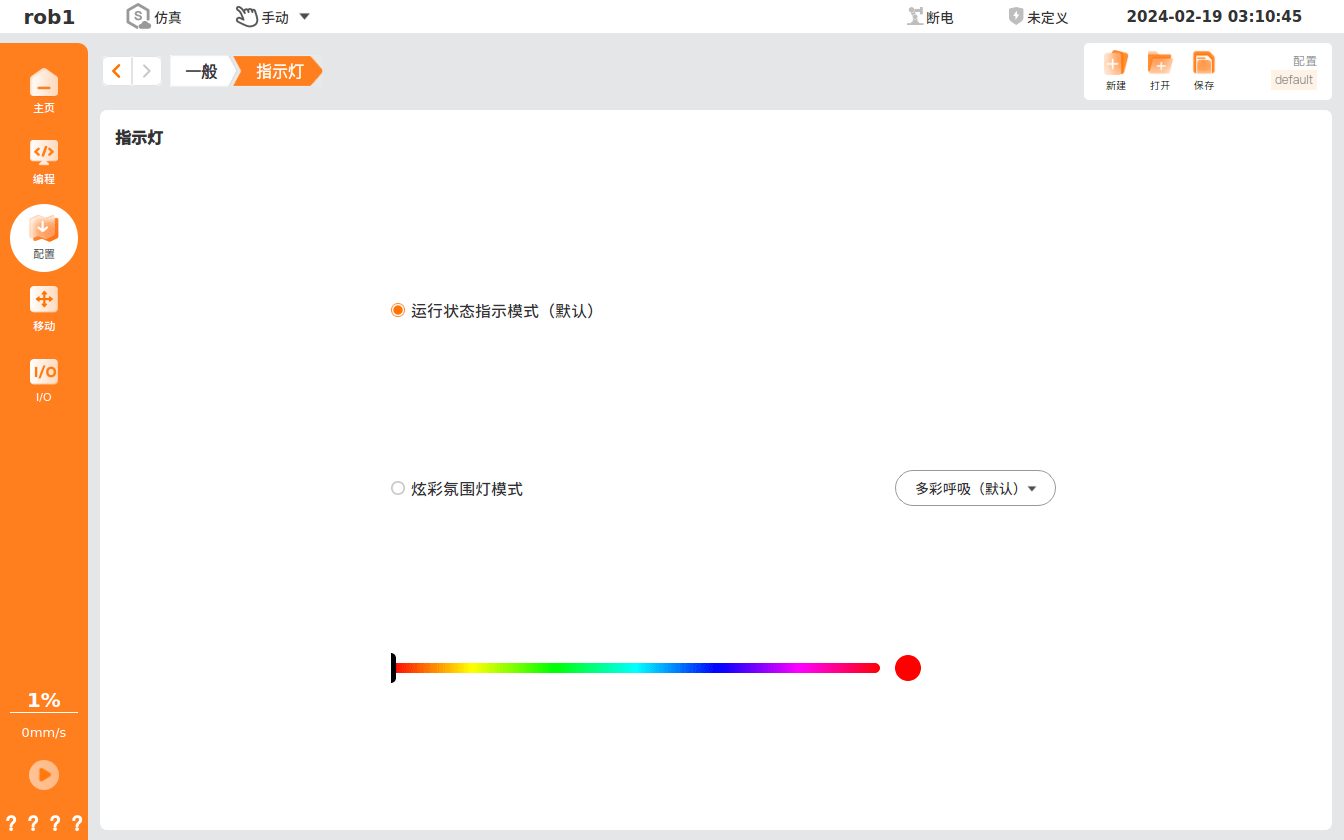
指示灯*
【指示灯】可以设置机器人指示灯模式,该功能仅部分型号机械臂支持,具体请参见硬件用户手册。
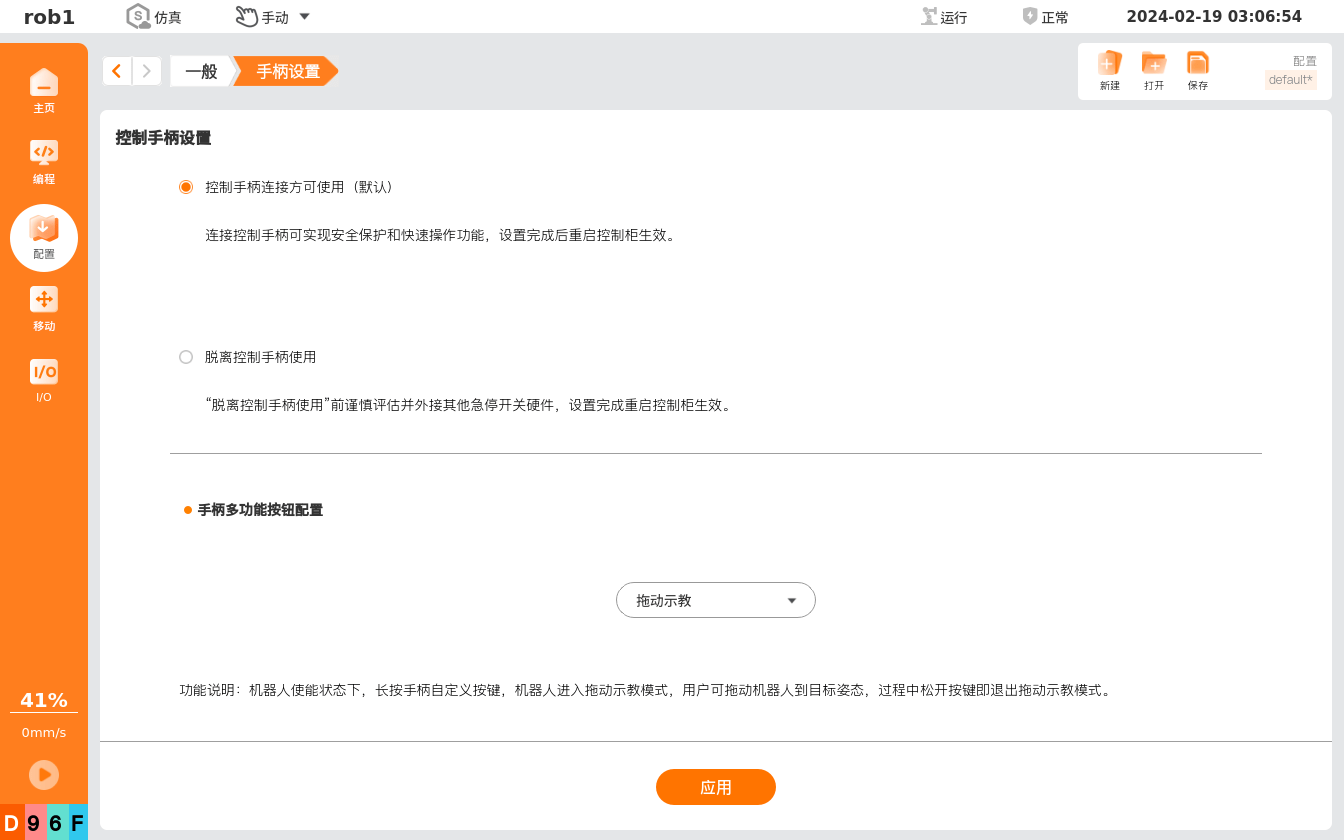
手柄设置*
【手柄设置】可设置与产品配套的手柄的控制方式,也可对手柄上的自定义按键进行功能配置。该功能仅部分型号控制器支持,具体请参见硬件用户手册。

提示
手柄完成设置后,单击【应用】仅使设置临时生效。如需重启不丢失相关设置,请单击【保存】保存当前的安装配置文件。
夹爪
【夹爪】支持在软件内部集成常用电爪品牌,通过 RS485 通信接口连接到机械臂末端或控制柜,并在示教器上提供完整的配置和在线编程能力。
1. 硬件连接
将夹爪通过 RS485 通信接口连接至机械臂末端或控制柜。
说明:
配置夹爪前,请确保夹爪物理连接正确,供电系统运行正常。
2. 软件配置
在示教器左侧导航栏依次单击“配置 > 一般 > 夹爪”。
在夹爪配置页左下角单击【添加】即可开始新夹爪设备的添加操作。

夹爪配置
激活已配置的夹爪:系统会自动将默认 TCP 设置为夹爪中心(根据尺寸 / 安装情况),夹爪模型与机械臂模型在页面上同步显示。
名称:夹爪名称。
品牌:夹爪品牌,目前已支持大寰、柔触、钧舵。
型号:可选择对应品牌下的具体夹爪型号。
串口号:选择系统识别到的通信串口,建立与夹爪的数据连接通道。
设备 ID:设备唯一标识符。
安装位置
启用:用于启用 / 禁用夹爪安装位置配置功能。
X/Y/Z (mm):定义夹爪在机器人末端法兰坐标系下的线性偏移量,单位为毫米。
RX/RY/RZ (°):定义夹爪在机器人末端法兰坐标系下的姿态旋转角度,单位为度,分别对应绕 X、Y、Z 轴的旋转。
配置完成后,单击【确认】即可完成新夹爪设备的添加操作。
夹爪添加完成后即可对夹爪进行配置。
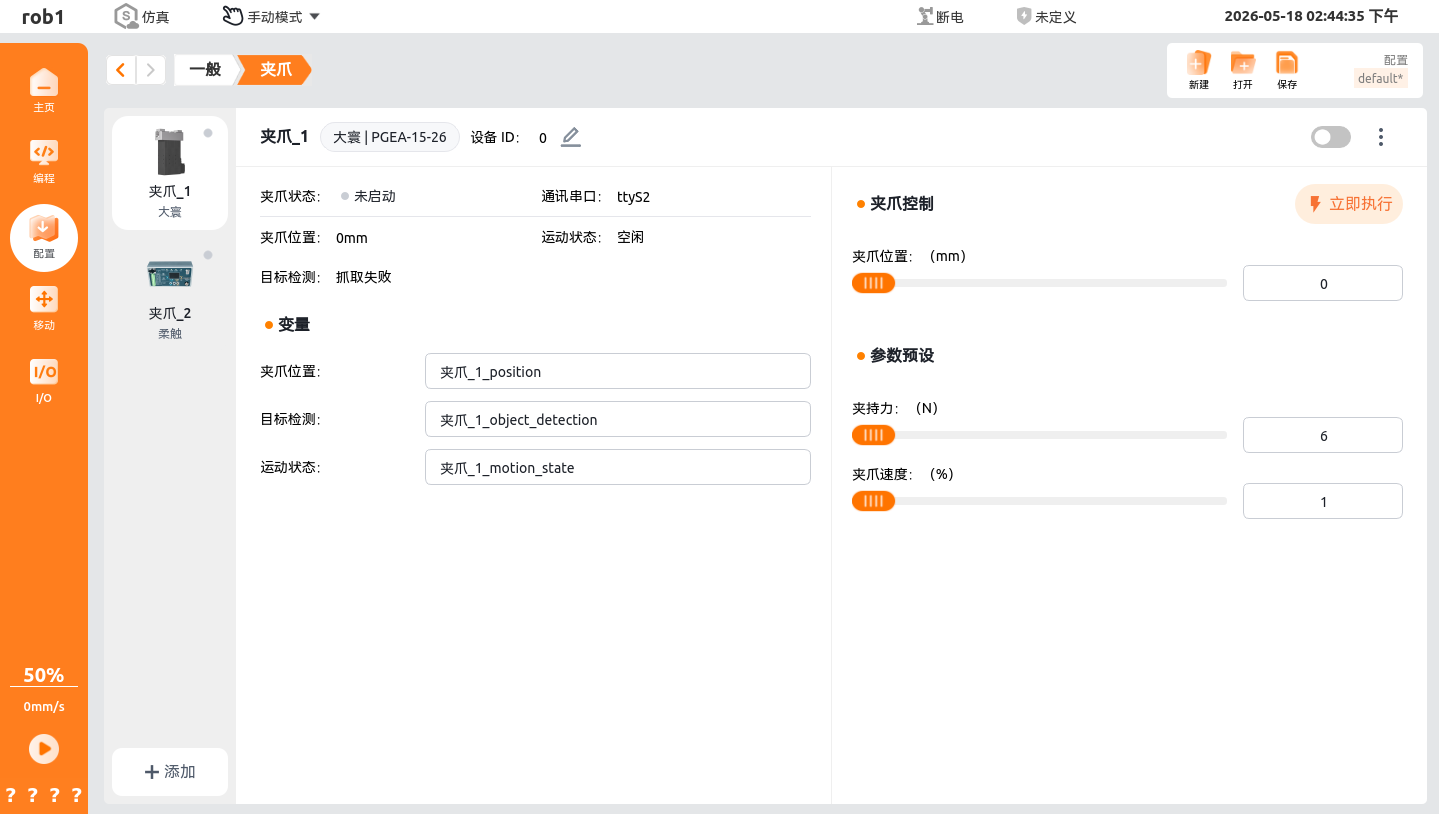
夹爪使能按钮:控制夹爪是否使能。
夹爪信息:
设备 ID:添加夹爪时设置的设备 ID,用于多设备场景下区分不同夹爪,可修改。
夹爪状态:
未启动:夹爪未使能。
正常:夹爪使能状态正常。
通信故障:夹爪线缆连接有误。
夹爪故障:夹爪硬件损坏或功能失效。
夹爪温度过高:夹爪温度大于 85 ℃。
夹爪电压异常:夹爪供电电压超出正常范围。
夹爪电流异常:夹爪供电电流超出正常范围。
夹爪使能失败:夹爪使能流程未完成或使能条件不满足。
通讯串口:添加夹爪时设置的串口号。
夹爪位置:夹爪当前的张开 / 闭合位置,单位毫米(mm)。
运动状态:夹爪的运动状态,包含【空闲】及【运动中】两种状态。
目标检测:夹爪内置的抓取状态反馈功能,通过位置闭环与电流 / 力控反馈,判断夹爪是否成功夹持到目标物体。
夹爪控制
- 夹爪位置:夹爪开合的目标位移量,需在设备行程范围内设置(0~26mm),设定后夹爪将移动至指定位置。
参数预设
夹持力:夹爪闭合时的夹紧力,直接影响抓取稳定性与工件安全性,需根据工件材质、重量调整。
夹爪速度:夹爪开合的运动速度,以设备最大速度的百分比表示,数值越小动作越平缓。
变量
夹爪位置:获取夹爪当前的位置数值(0-26mm),可以用来判断夹爪是否到位。
目标检测:获取目标检测的结果(成功 / 失败),可以用来做抓取逻辑判断(比如失败就报警重试)。
运动状态:获取夹爪的运动状态(空闲 / 运动中),可以用来做流程等待(比如等夹爪动作完成再走下一步)。
3. 编程使用
在编程树中单击“模板 > 夹爪”添加【夹爪】节点。
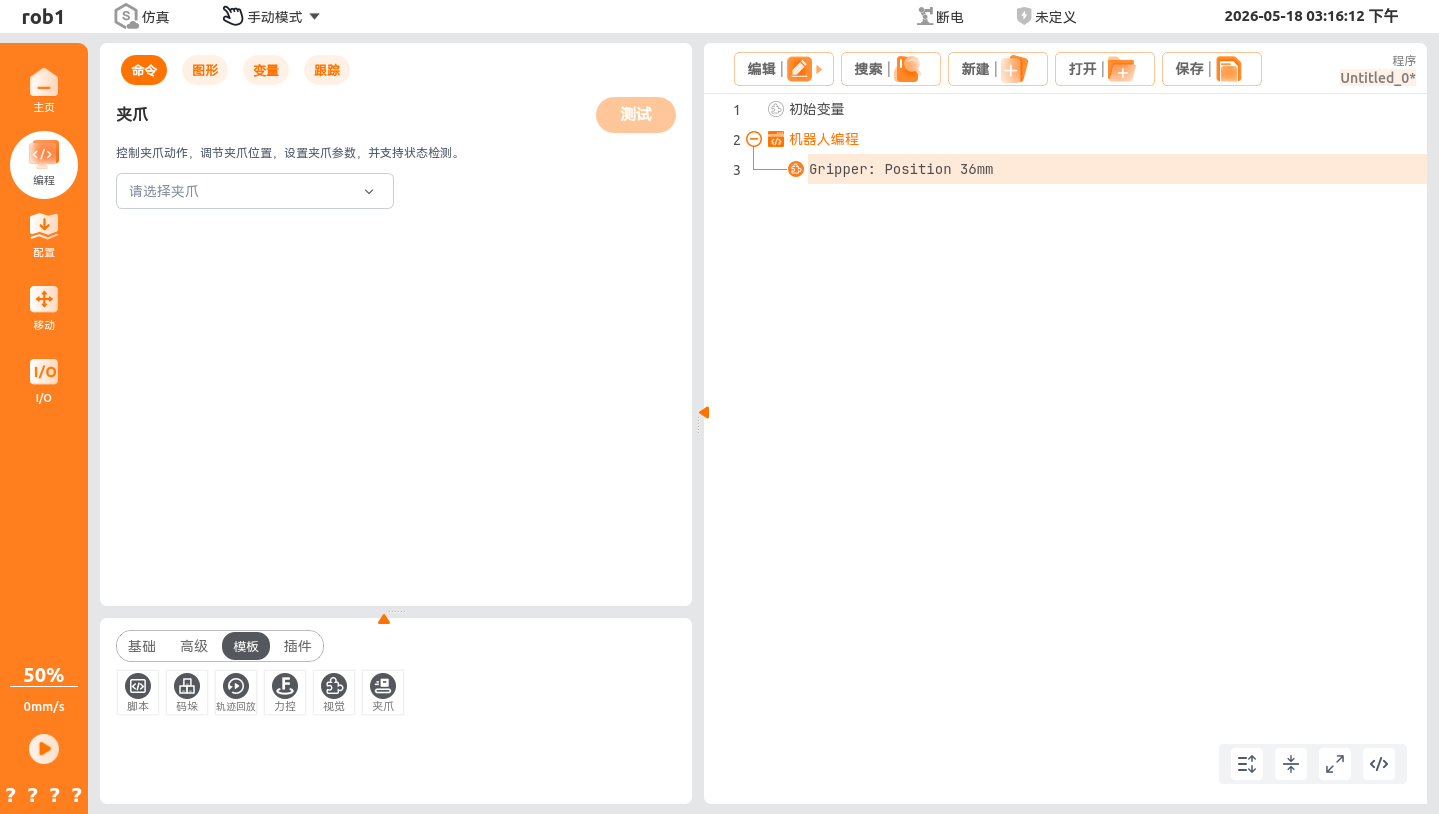
选择在【配置】中添加的夹爪,可以选择是否开启【位置控制】。
开启【位置控制】:
控制逻辑:夹爪运动至指定目标位置后停止;若运动过程中夹持力达到设定阈值,也会提前停止并判定抓取成功。
适用场景:工件尺寸已知、需要固定开度的标准化抓取,或需精确控制夹爪行程的场景。
生效参数:夹爪位置(mm)、夹爪速度(%)、夹持力(N)。
关闭【位置控制】:
夹爪将以设定的夹持力为优先控制目标,执行力控自适应抓取。
控制逻辑:夹爪持续向闭合方向运动,直至检测到到达设定的夹持力阈值(抓取到工件)或到达机械极限位置后停止,目标位置参数将被忽略。
适用场景:工件尺寸未知 / 有偏差、易碎工件或柔性抓取场景,可避免因位置偏差导致工件损坏。
生效参数:夹爪速度(%)、夹持力(N)。
可选择是否开启【等待夹爪运动完成】
开启【等待夹爪运动完成】
控制逻辑:机器人主程序将进入等待状态,直至夹爪动作执行完成(到达目标位置/触发力控停止条件)后,再执行后续指令。
适用场景:抓取、放置等需要确认夹爪动作完成后再移动的工序,避免工件脱落或程序逻辑混乱。
关闭【等待夹爪运动完成】
控制逻辑:机器人主程序将不等待夹爪动作完成,立即执行后续指令,夹爪动作与机器人运动异步并行执行。
适用场景:对节拍要求极高、且夹爪动作与机器人移动无安全干涉的场景,可提升程序运行效率。
运行【测试】,夹爪即可按照设置的参数运动。
碰撞
AUBO 机器人提供外力过大保护功能,机器人能够感知外部施加的压力,并采取相应的措施来保护自身或防止对周围环境和人员造成伤害。
【碰撞】界面提供了碰撞等级、碰撞模式等功能设置,用户可以根据实际情况修改碰撞等级和碰撞后机器人的处理方式,确保机器人在使用过程中的安全性和可靠性。
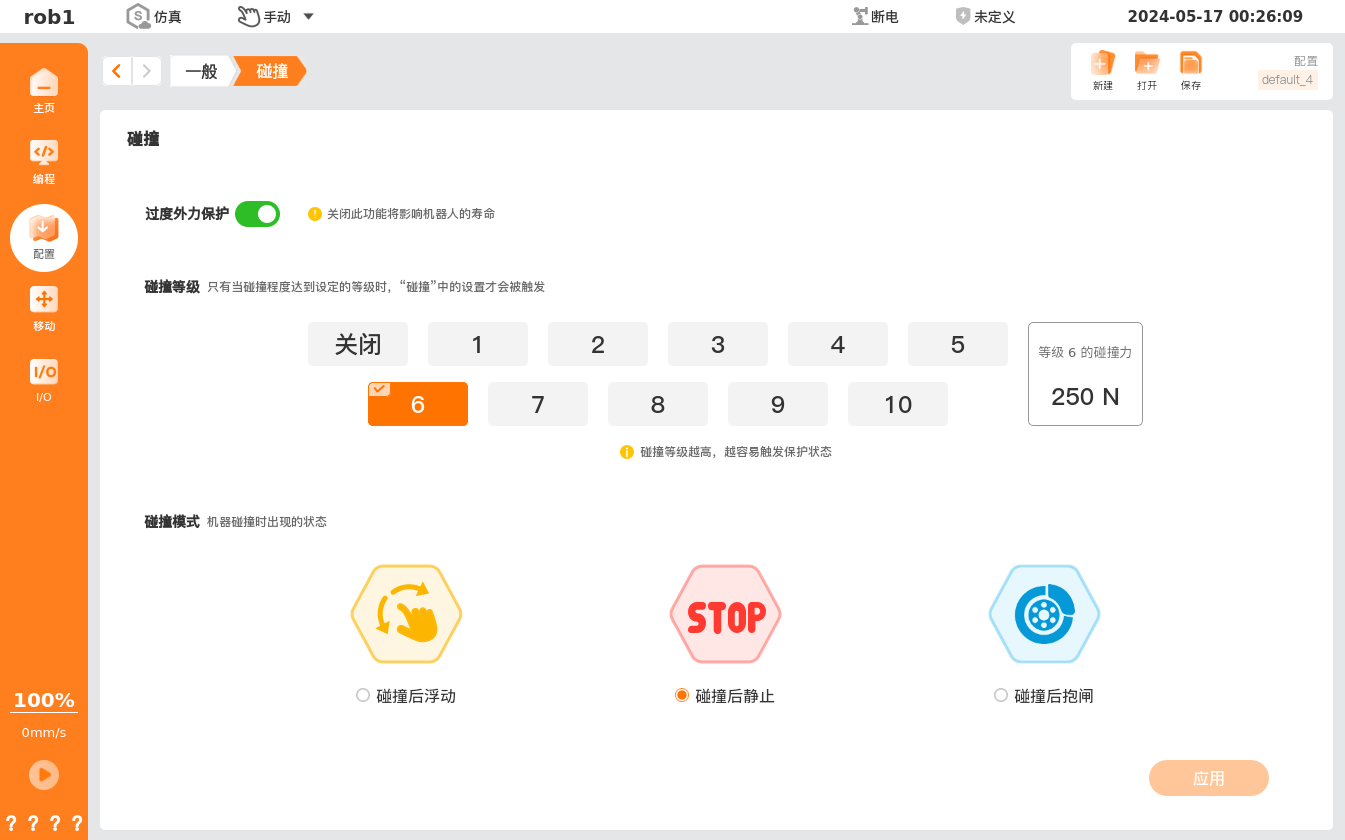
1. 过度外力保护
开启:机器人在静止状态下,受到超过系统判定的安全外力时,机器人将进入拖动示教模式,避免损坏重要运动部件。
关闭:机器人在静止状态下受到较大外力可能会造成机器人关键执行部件的的损伤,影响机器人使用寿命。
2. 碰撞等级
机器人触发碰撞事件的灵敏程度,共有 10 个安全等级,数值越小等级越高,触发碰撞事件所需的力越大。系统默认碰撞等级为 6。
3. 碰撞模式
碰撞事件发生后,机器人的处理方式。
- 碰撞后浮动:碰撞发生后,机器人停机进入拖动示教模式,操作人员可以手动拖动机器人至任意安全位置。
- 碰撞后静止:碰撞发生后,机器人停机,保持静止不动。
- 碰撞后抱闸:碰撞发生后,机器人停机抱闸,保持静止不动(该功能仅适用于固件版本为 1.*.* 的机器人)。