拖动示教
拖动示教模式下,可以手动拖动机器人。
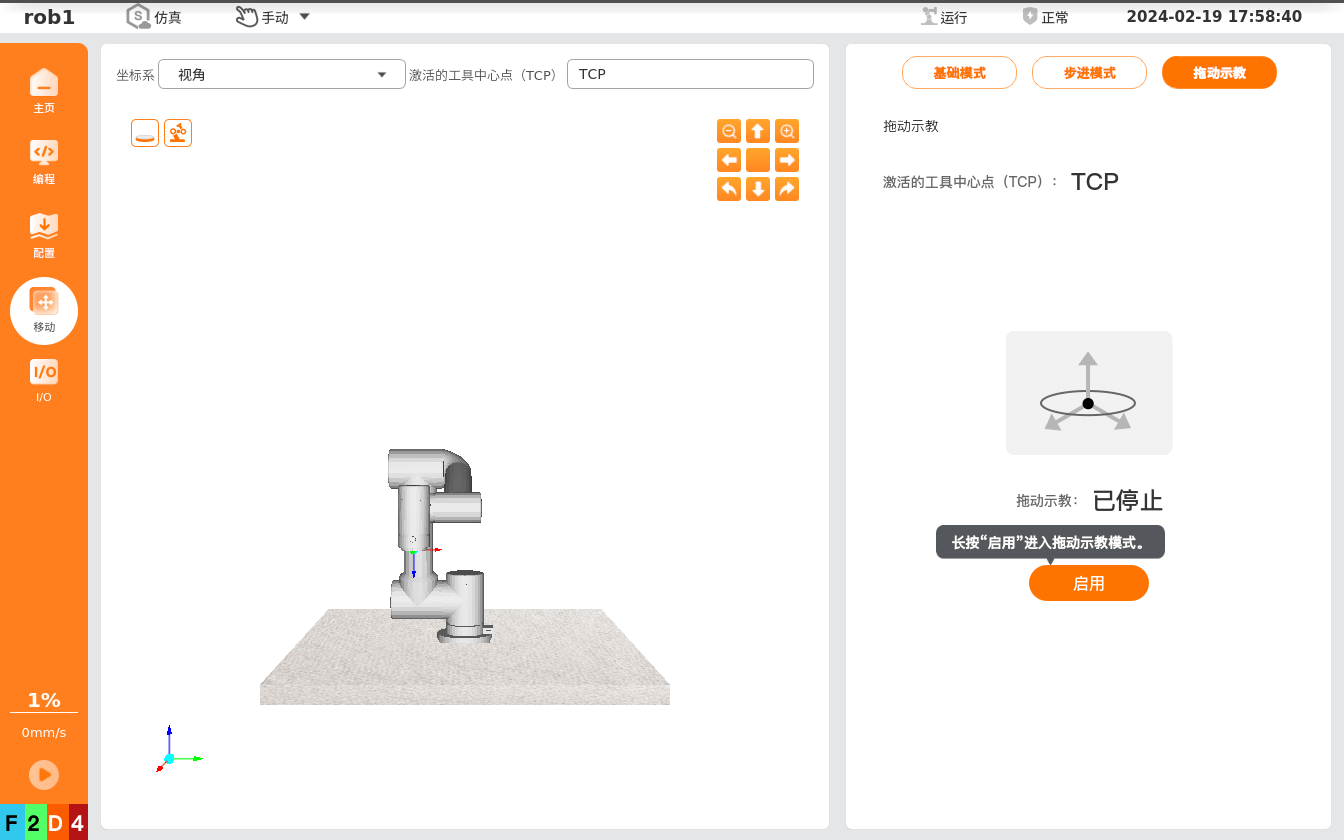
- 拖动示教:长按【启用】按钮,拖动示教显示 “开始”,即进入拖动示教模式,用户可直接拖动机器人到目标位姿。单击【禁用】按钮,拖动示教显示 “已停止”,即退出拖动示教模式,机器人保持当前位姿。
受限制拖动示教
受限制拖动示教可在 “设置 > 偏好 > 机器人” 中开启或关闭。
开启受限制拖动示教后,用户可以锁定一个或多个轴,使 TCP 在指定的方向上移动。

| 图标 | 描述 |
|---|---|
| 所有轴可移动。 | |
| 仅允许沿 X、Y 轴移动。 | |
| 允许所有轴移动,不可旋转。 | |
| 允许在所有轴上旋转,不可移动。 |
力控拖动
力控拖动功能允许用户在拖动示教模式下通过施加外力直接牵引机械臂运动,实现示教编程。
触发方式
末端按钮触发: 在机械臂末端法兰上安装力控按钮,按下按钮后进入拖动模式。
示教器按钮触发: 通过示教器背面三位置的专用按钮激活拖动模式。
外部 IO 触发: 通过外部数字输入信号控制拖动模式。
说明:
需要配置 DI Action 为 HandGuide。
拖动操作
- 激活拖动模式后,机械臂进入自由移动状态。
- 用户施加外力牵引机械臂到目标位置。
- 机械臂实时响应拖动力。
退出拖动
- 释放按钮。
- 再次点击示教器按钮。
- 移除外部 I/O 信号。
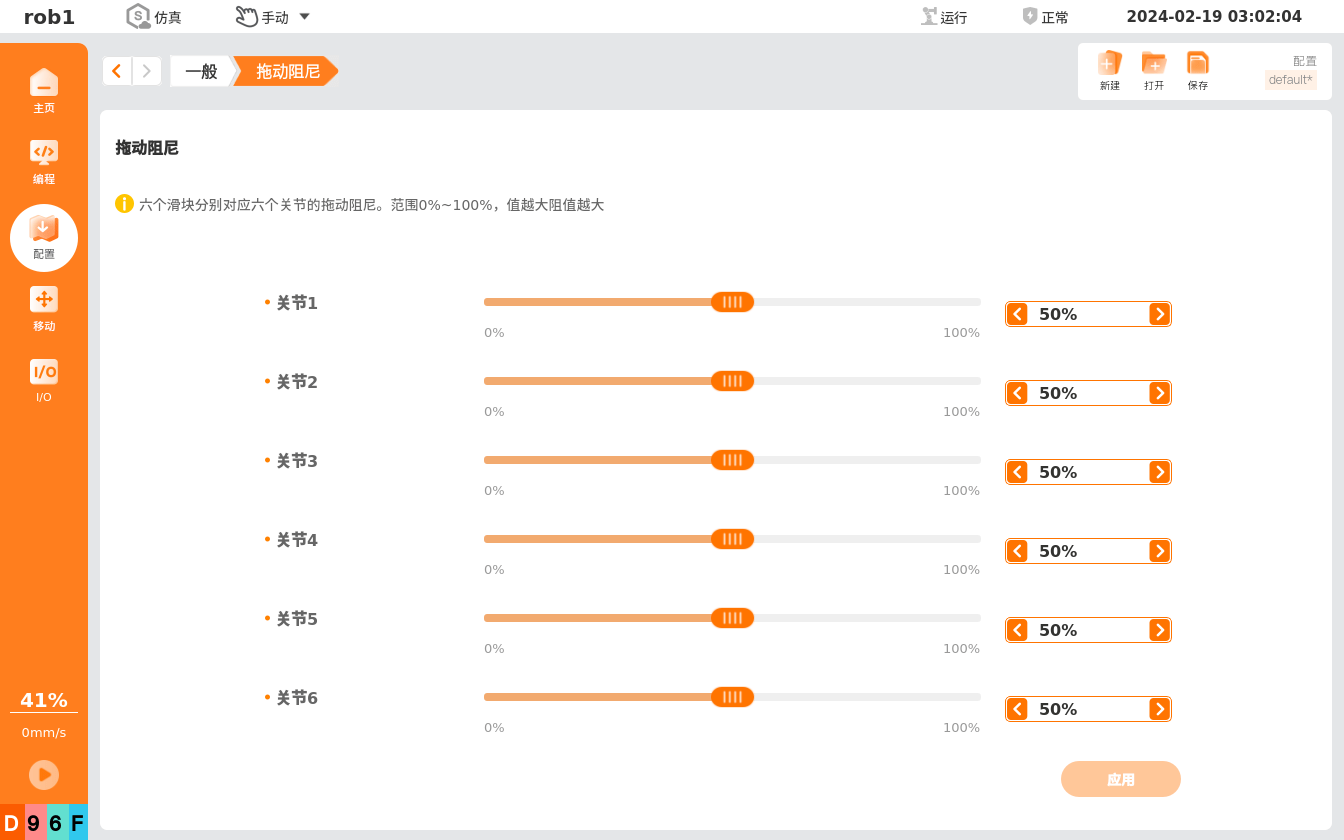
拖动阻尼
【拖动阻尼】可以设置在拖动机器人各个关节时所需的力。设置的值越大,拖动关节时需的力越大。
提示
参数设置后,必须单击右上角的【保存】按钮才能保存参数。单击【应用】按钮或机器人重新上电,只能使设置的参数生效,不能保存参数。